Step-by-step pipeline inner wall defect image acquisition robot
A technology of image acquisition and image acquisition device, which is applied in the field of step-by-step pipeline inner wall defect image acquisition robot, which can solve the problems of slow running speed and complicated robot control, and achieve the effect of strong obstacle-surpassing ability and improved operation stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
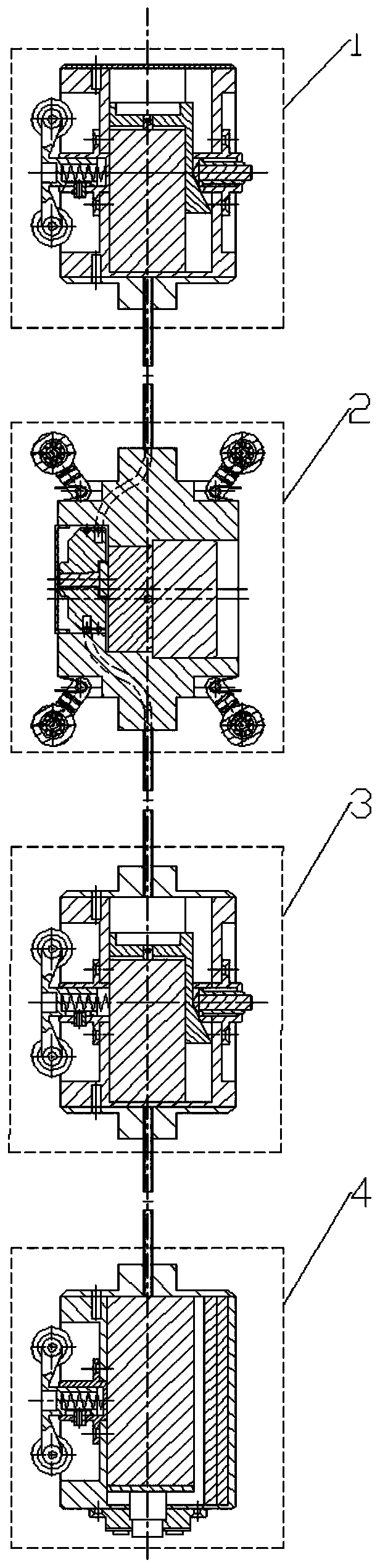
[0040] The step-by-step pipeline inner wall defect image acquisition robot of the present invention, such as Figure 1-Figure 5 As shown, it includes a first locking device 1, a power device 2, a second locking device 3 and an image acquisition device 4 connected sequentially through a flexible shaft 500 from top to bottom;
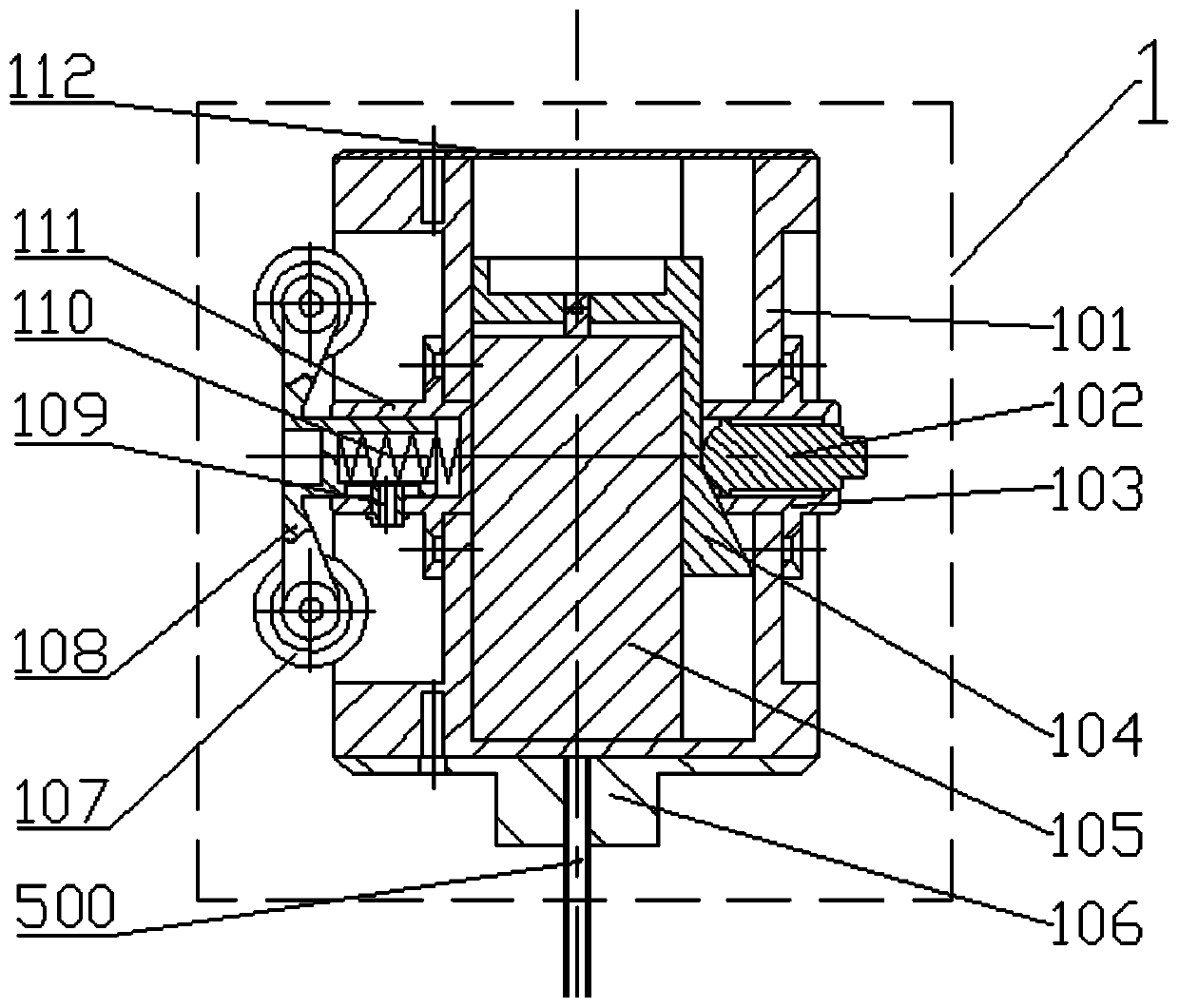
[0041] Both the first locking device 1 and the second locking device 3 include a hollow locking device box 101, an electromagnet 105 is installed axially in the locking device box 101, and an output rod on one side of the electromagnet 105 is installed. There is a wedge-shaped slider 104, and the concave surface of the wedge-shaped slider 104 is provided with a locking column end cover 103. The locking column end cover 103 is connected with the corresponding groove on the outer wall of the locking device box 301 by screw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More