

Raster scanning for depth detection
A raster scanning and detector technology, which is used in distance measurement, measurement device, line-of-sight measurement, etc., and can solve problems such as poor signal-to-noise ratio and depth that cannot be determined.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
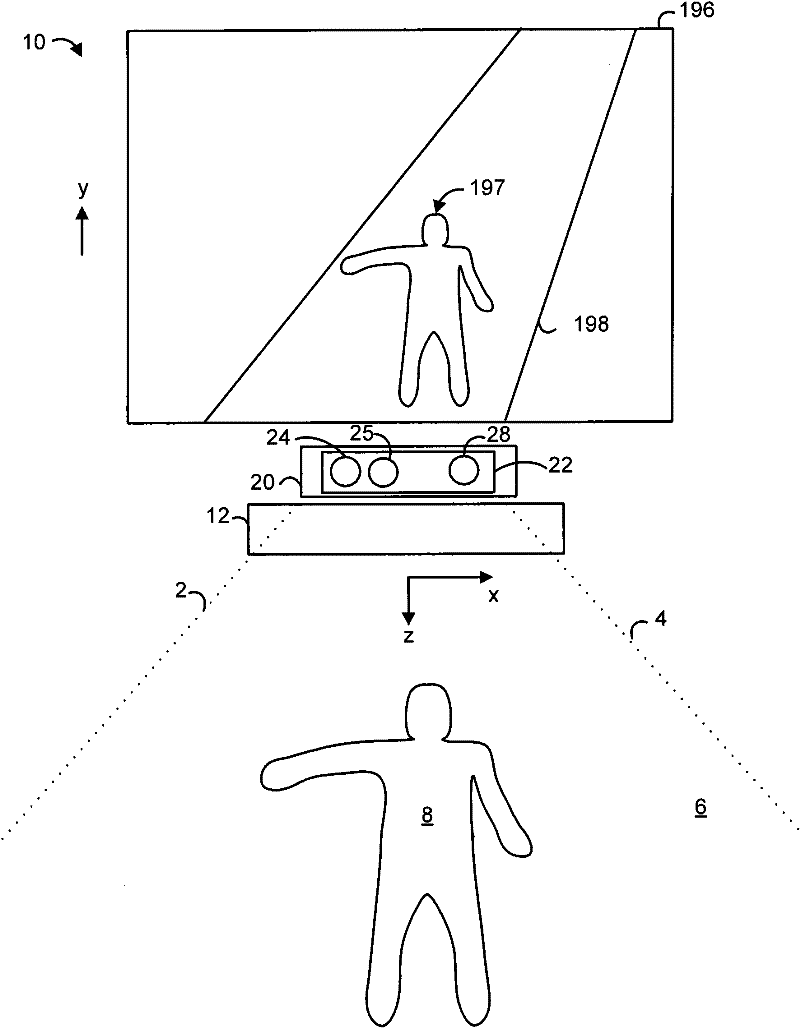
[0021] Techniques are provided for determining one or more distances to an object (or objects) within the field of view of a depth camera. Techniques may include raster scanning light on objects within the camera's field of view. An image of light reflected from the object is received at the camera. One or more distances to the object are determined based on the reflected image. In one embodiment, a 3D map of one or more objects within the field of view is generated.
[0022] In an embodiment, determining the distance(s) to the object includes determining a time-of-flight between sending light from a light source within the camera and receiving a reflected image from the object. Separate time-of-flight information can be determined for different points within the raster scan. Thus, a 3D mapping of the object can be determined.
[0023] In one embodiment, the raster scanning light includes a raster scanning pattern into the field of view. Determining the distance(s) to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More