

Calibration method for multi-robot system base coordinate system possessing cooperation relation
A base coordinate system and multi-robot technology, applied in the field of industrial robots and flexible manufacturing systems, can solve the problems of calibration method steps and accuracy differences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
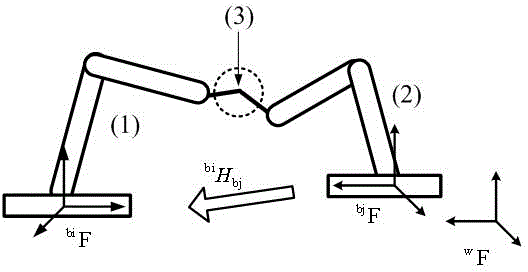
[0057] Taking the dual-robot collaborative system as an example, the hardware basis for realizing the present invention is as follows: Figure 5 shown. Figure 5 1 is a robot , 2 is a robot , 3 is the calibration finger, 4 is the robot controller, 5 is the robot The controller, 6 is the coordination controller, and 7 is the collaborative system teaching box. Among them, the controllers of each robot have installed joint position sensors and can complete the robot's forward kinematic transformation, and most industrial robots meet this requirement. The coordination controller 6 completes the planning and control of the collaborative motion among multiple robots, including tasks such as the calibration of the base coordinate system between the collaborative robots. Coordinating controller 6 is a functional component that can be physically realized by extending the system software on the existing robot controller. For the multi-robot collaborative system, the collaborat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More