

Self-calibration method for parallel robot
A robot and self-calibration technology, applied in the field of robotics, can solve the problems of harsh instrument installation conditions, difficult installation of measuring equipment, long test distance, etc., and achieve the effect of easy installation accuracy, low calibration environment requirements, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The self-calibration method of the parallel robot according to the present invention is described in detail with reference to the accompanying drawings.
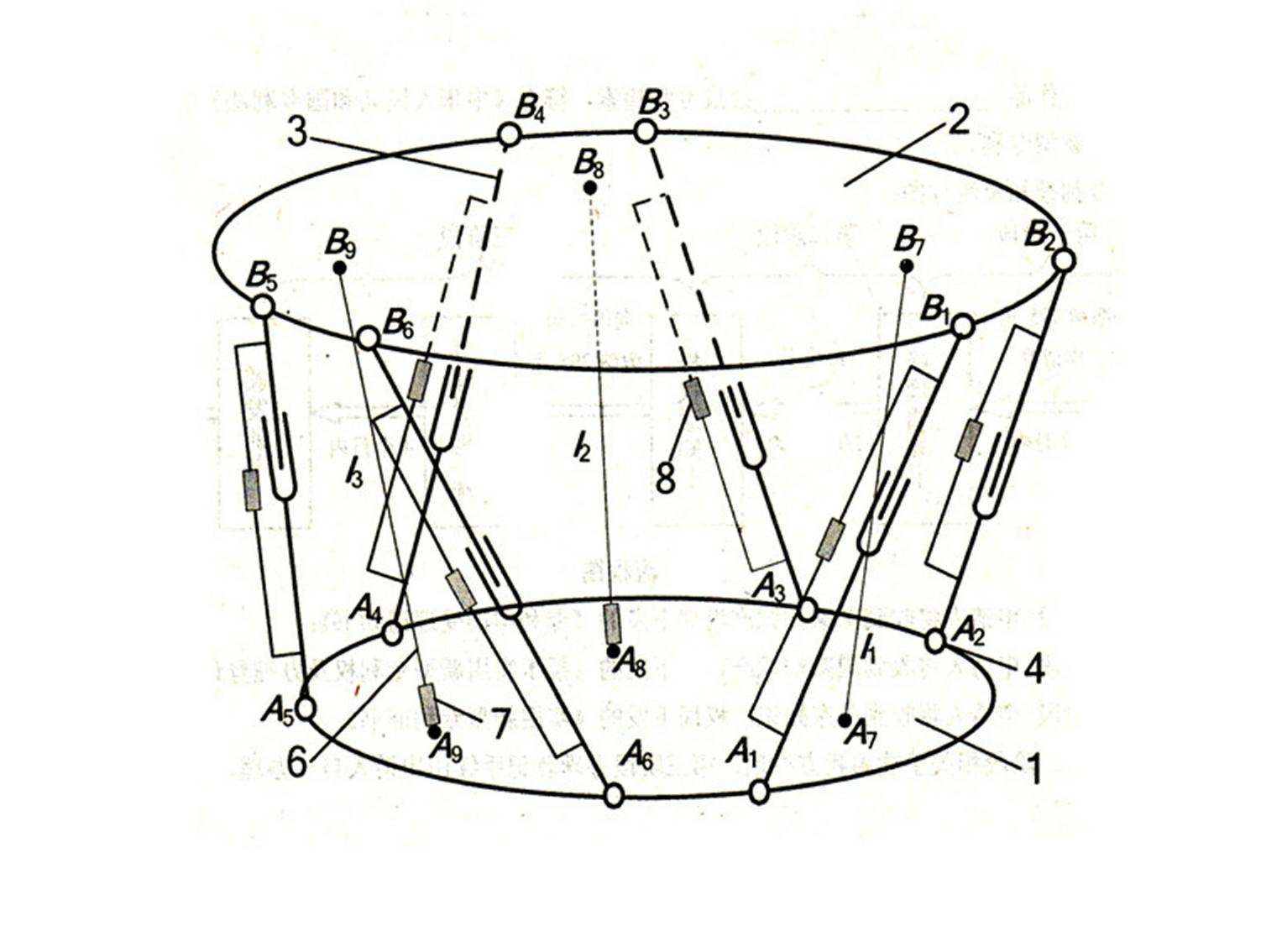
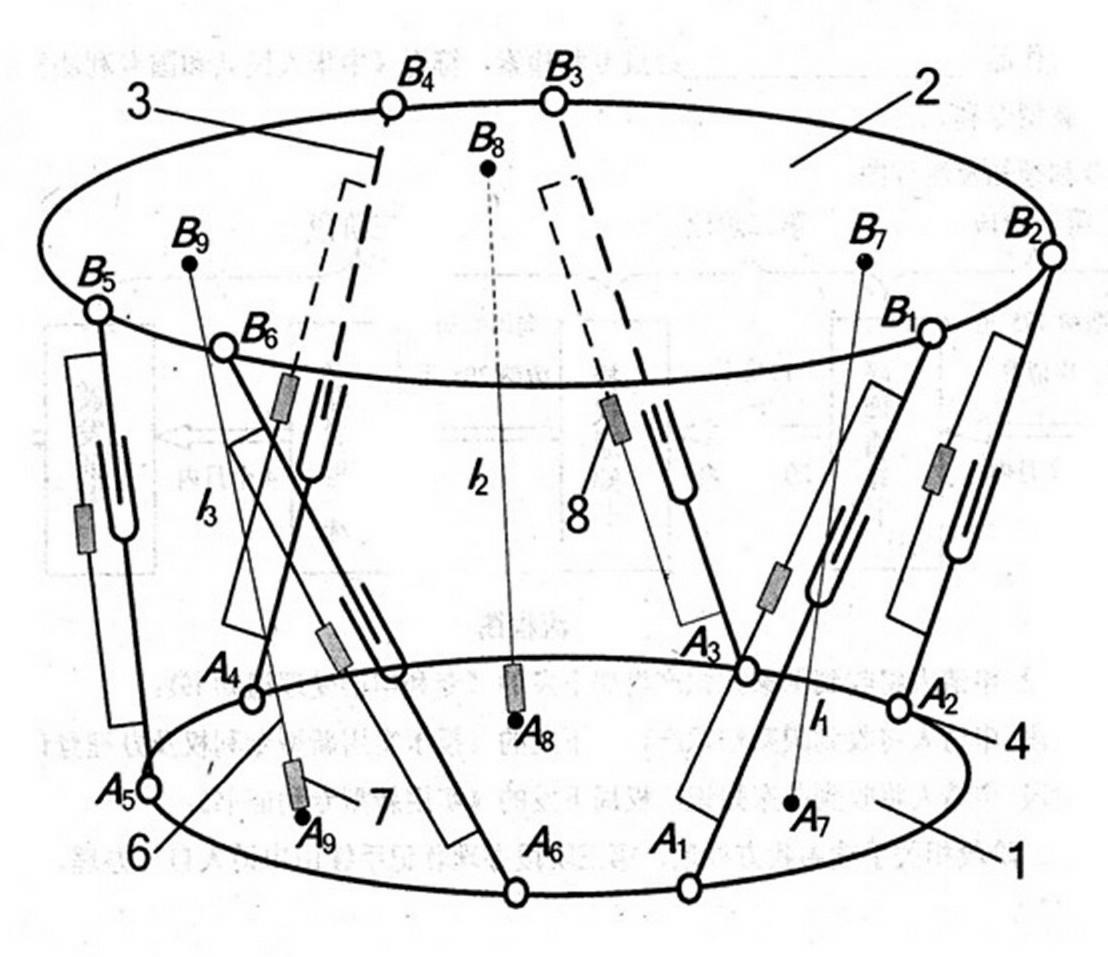
[0018] Such as figure 1 As shown, the parallel robot involved in the present invention consists of a fixed platform 1, a moving platform 2, and a driving branch 3 ( A 1 B 1 , A 2 B 2 ,..., A 6 B 6 ) And hinges 4 and 5 (Hooker hinges or spherical hinges) that connect each branch to the fixed and moving platforms; 3 measuring branches 6 are added between the fixed platform 1 and the moving platform 2 of the parallel robot. A 7 B 7 , A 8 B 8 , A 9 B 9 ), the two ends of which are respectively fixed to the fixed and moving platforms (can be connected by thread or welded, at any position), each branch is installed with a rope sensor 7; the parallel robot is installed on the moving pair of each driving branch Displacement sensor 8.
[0019] Corresponding to a specific pose, the relationship equations between 6 driving branches ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More