

Environment modeling method applicable to navigation of automatic piloting vehicles
A self-driving car and modeling method technology, applied in the field of vehicle navigation, can solve problems such as difficult application, limited value of vehicle autonomous navigation and intelligent obstacle avoidance, and achieve high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
[0036] The test environment of this embodiment is a city street, the overall driving distance of the vehicle in the test is 1410m, and the average vehicle speed is 40km / h.
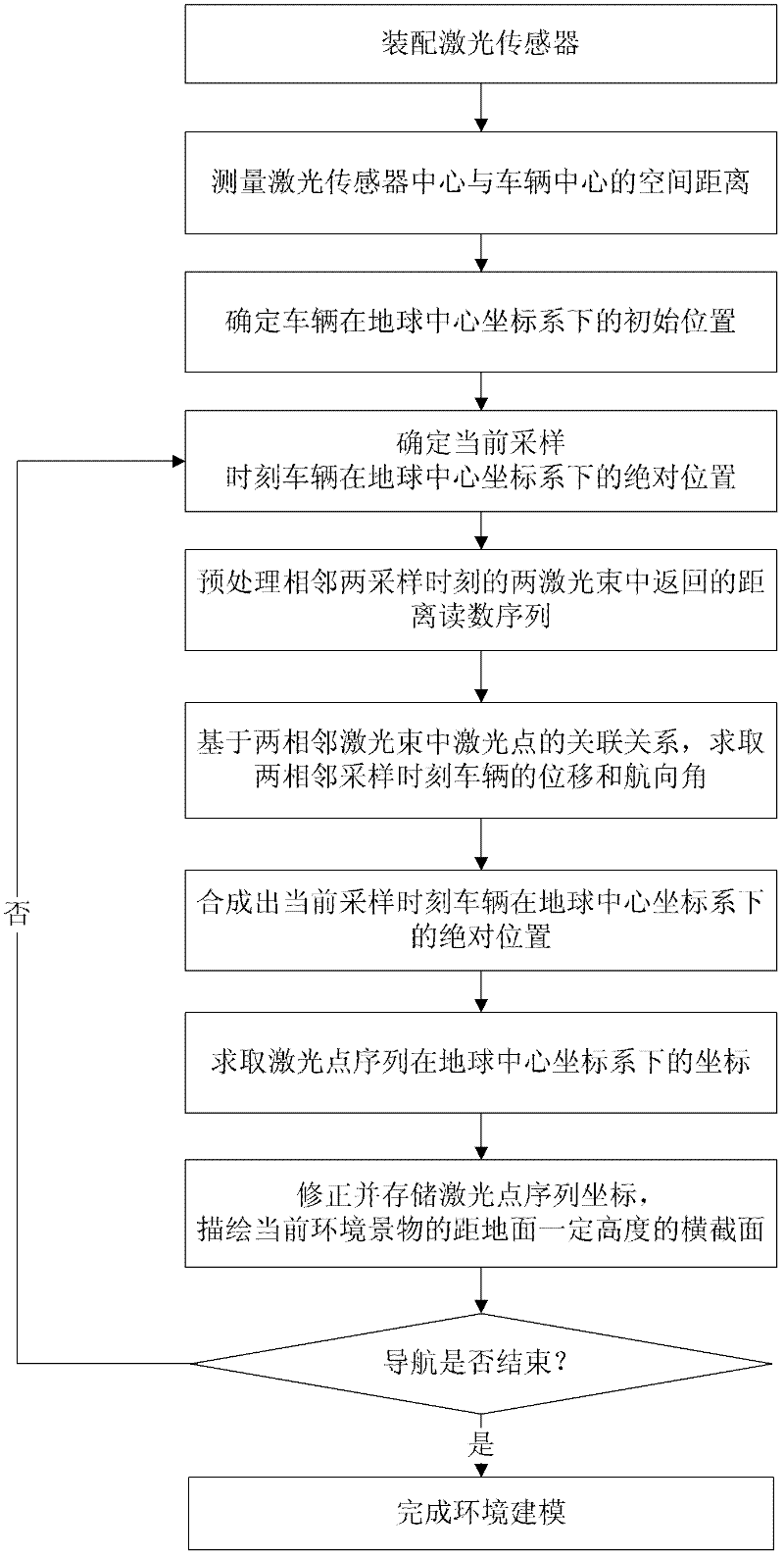
[0037] Such as figure 1 Shown, the embodiment of the present invention comprises the following steps:
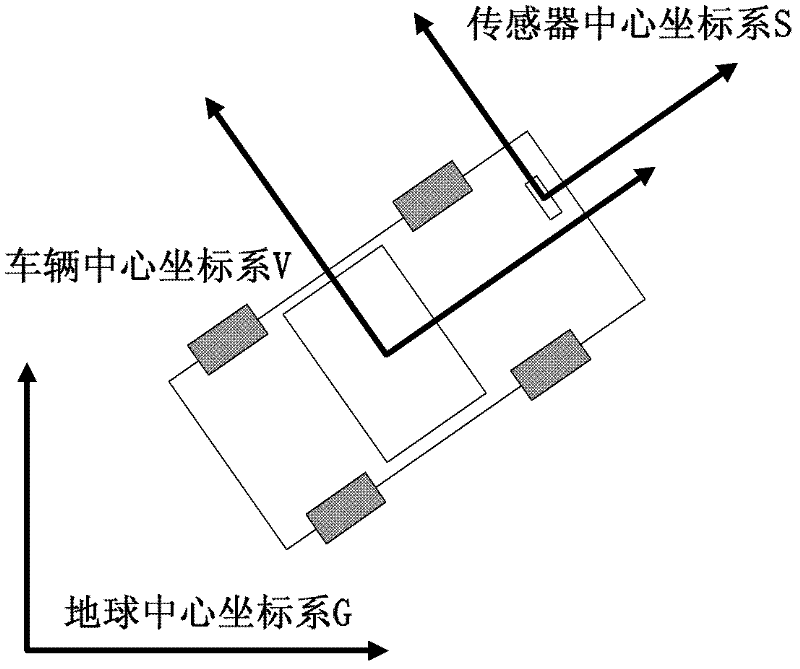
[0038] The first step is to assemble laser sensors on the front end of the self-driving car. In the experiment of this embodiment, a civilian car is used as a test vehicle, and a SICK LMS 221 is used as a test laser sensor, which is installed at the front end of the test vehicle at 1.2m from the ground, facing the forward direction of the vehicle. The configuration of this embodiment has a visual angle resolution of 0.5 degrees, that is, each laser beam contains 361 lase...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More