

Myoelectric prosthetic hand for self-rehabilitation training of patients with hand dysfunction
A technique for dysfunction and rehabilitation training, applied in prosthetics, medical science, artificial arms, etc., to achieve the effect of restoring the autonomous movement ability of the hand, returning to normal life, and good rehabilitation training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with accompanying drawing and specific embodiment the present invention will be further described:
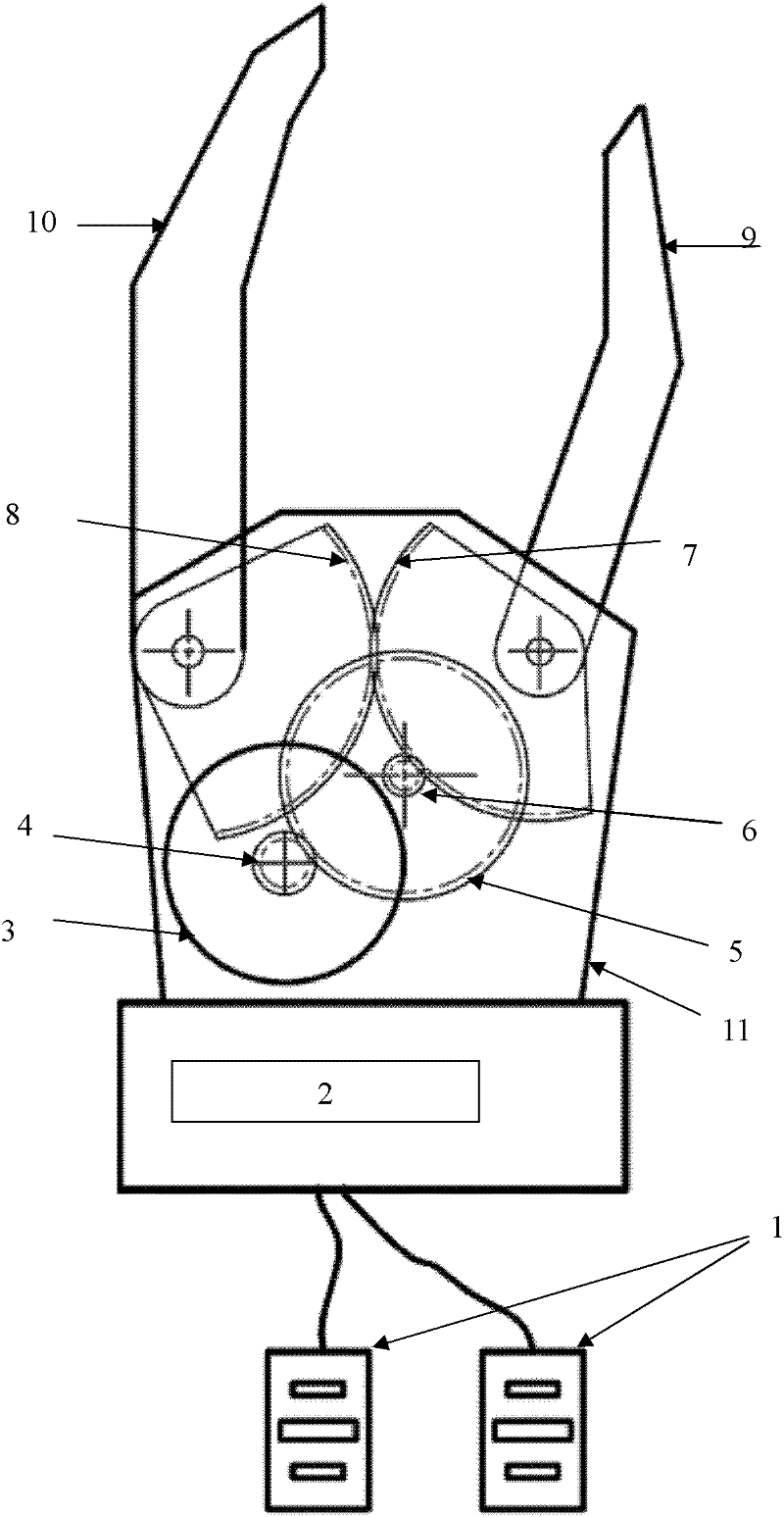
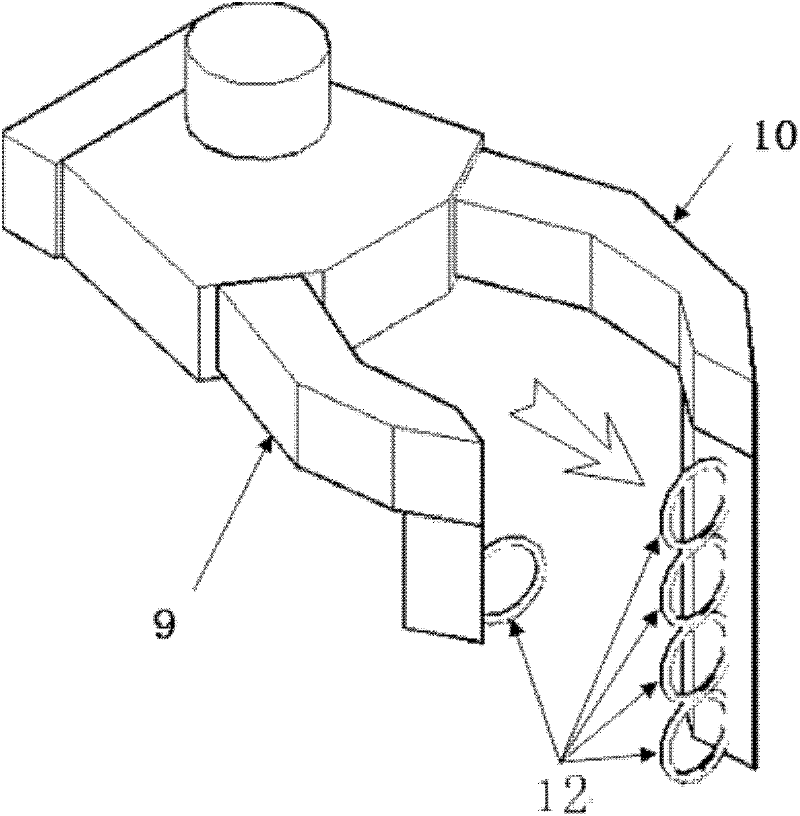
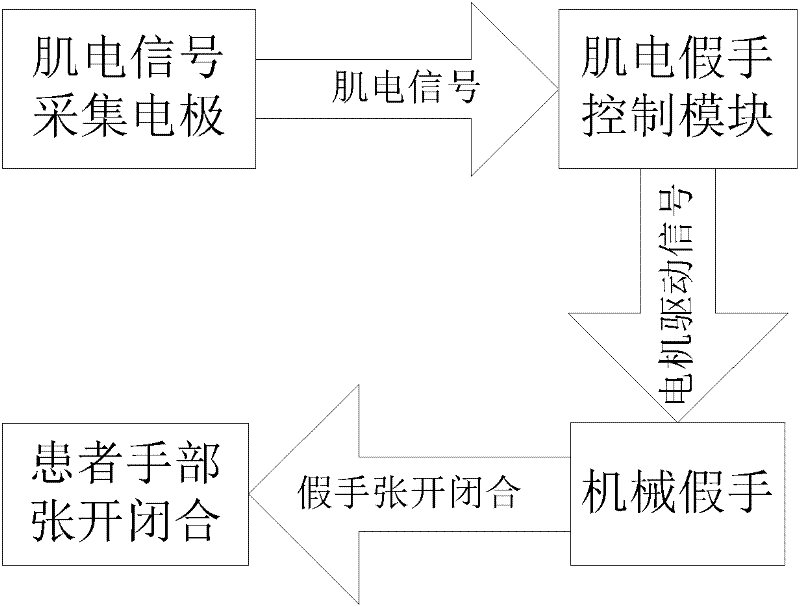
[0024] A myoelectric prosthetic hand for autonomous rehabilitation training for patients with hand dysfunction, including a mechanical prosthetic hand, a control module and a myoelectric signal acquisition electrode, the signal of the myoelectric signal acquisition electrode is transmitted to the control module, and the control module outputs control signals to the mechanical prosthesis The control module includes a single-chip microcomputer and a motor drive circuit, the signal input end of the single-chip microcomputer is connected to the electromyographic signal acquisition electrode, and the control signal output end of the single-chip microcomputer is connected to the signal input end of the motor drive circuit; the mechanical prosthetic hand includes a housing, a motor, The short finger and the long finger; the motor is arranged in the casing; t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More