

Phase interferometer direction finding method for ambiguity resolution by extension baselines
A phase interferometer and deblurring technology, which is used in direction determination direction, radio wave measurement systems, instruments, etc., can solve the problems of high calculation amount, low utilization of array element information, inaccurate direction finding, etc. The effect of direction finding accuracy, improving the efficiency of the direction finding system, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
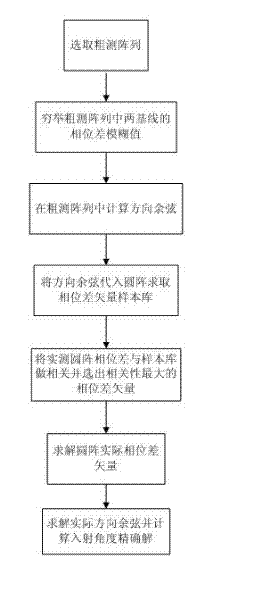
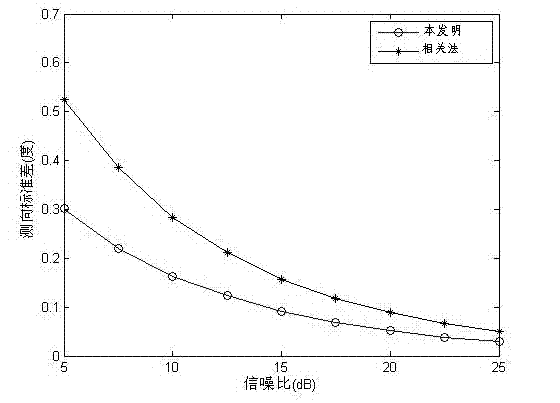
[0030] The present invention provides a phase interferometer direction-finding method for extended baseline de-fuzzification based on the idea of correlation method defuzzification. Through the present invention, the two-dimensional direction-finding accuracy of the correlation interferometer can be improved, while the amount of calculation can be reduced, and the direction-finding system can be improved. direction finding performance.
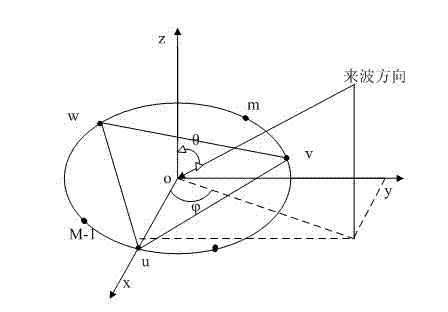
[0031] The present invention mainly selects a triangular array in the circular array, first solves the direction cosine through the phase difference between the elements of the triangular array, then substitutes the direction cosine back to the theoretical calculation formula of the phase difference of the circular array, and completes the calculation of the circular array through the correlati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More