

Image processing method for determining depth information from at least two input images recorded using a stereo camera system
A stereo camera and image processing technology, applied in the field of computer programs, can solve problems such as insufficient parallax estimation accuracy and standard deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
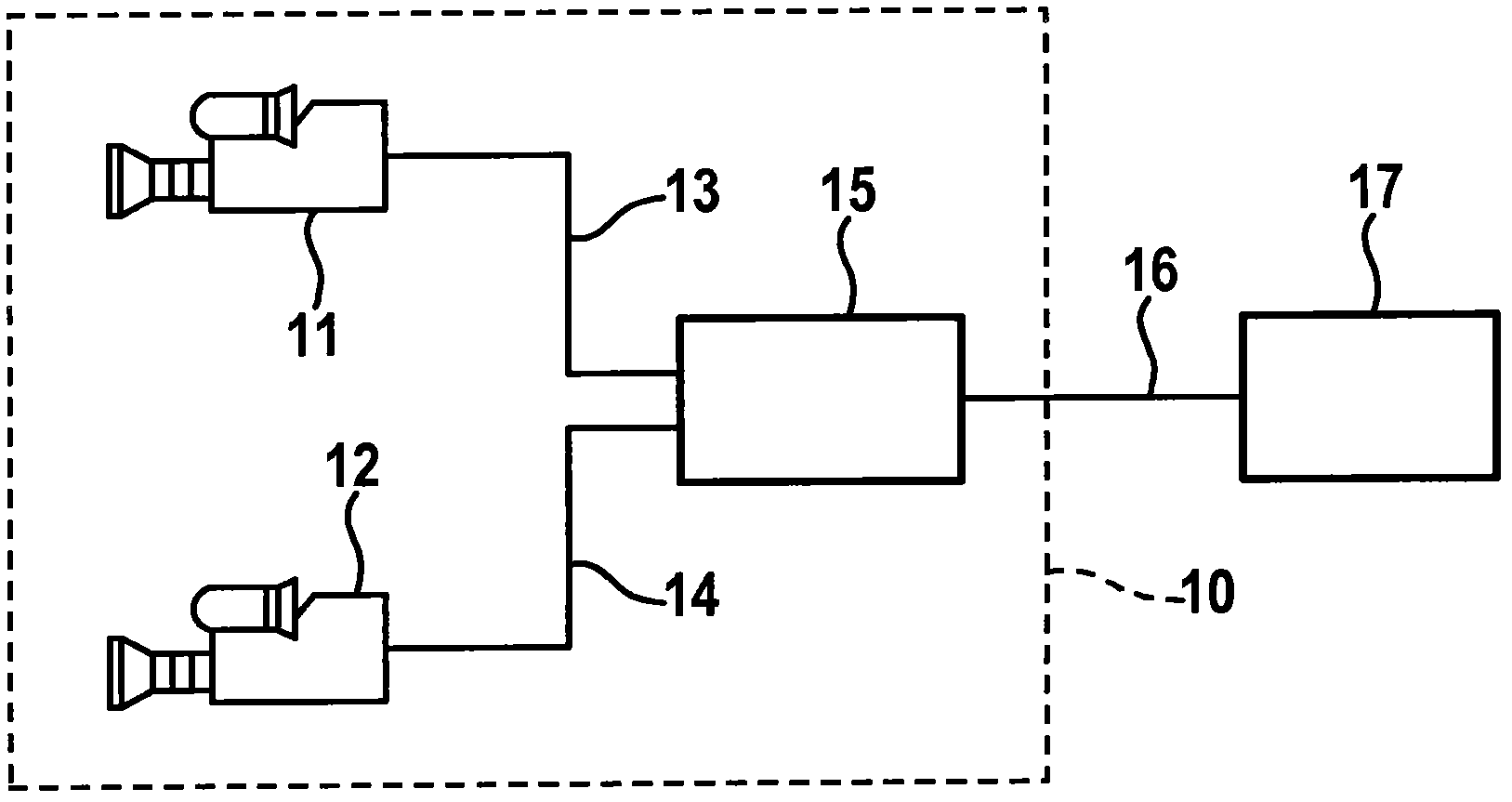
[0034] image 3 Shown is a stereo camera system designed as a stereo video system 10 with two image sensors 11 and 12, two image sensor signal lines 13 and 14, an evaluation unit or image processing device 15, an output signal line 16 and a System 17 behind. For example, CCD cameras or CMOS cameras can be used as image sensors 11 , 12 , but thermal imaging devices or the like can also be used. The two image sensors 11, 12 are arranged such that they image the same scene, but at slightly different viewing angles. The image sensors 11 , 12 transmit images of the observed scene to an image processing device 15 . The image processing device 15 generates an output signal on an output signal line 16 , which is transmitted electrically, digitally, acoustically and / or visually to a downstream system 17 for display, information and / or storage. In the present exemplary embodiment, the latter system is a driver information system 17 of a motor vehicle (not shown) which has a stereoscop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More