

Lower limb exoskeleton walking rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of medical devices, can solve problems such as limited functions, difficulty in training stroke and paraplegic patients, and inability to help patients walk, so as to enhance comfort and reliability and reduce complexity , to reduce the effect of impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
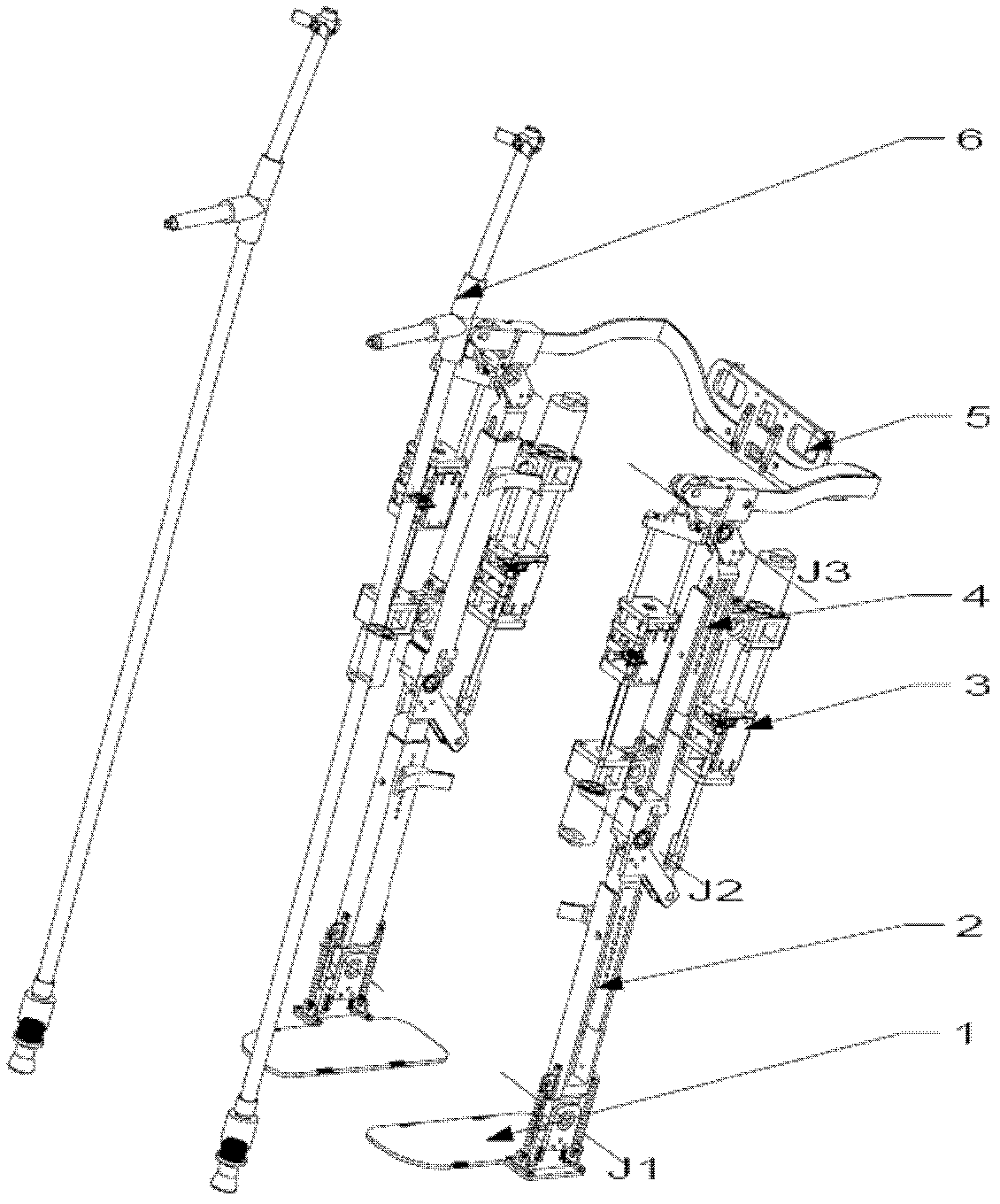
[0024] Such as figure 1 As shown, this embodiment includes: ankle joint movement module 1, knee joint movement module 2, elastic driver module 3, hip joint movement module 4, waist and support frame module 5, crutch module 6, wherein: knee joint movement module 2 two The ends are respectively connected to the ankle joint movement module 1 and the hip joint movement module 4, the elastic driver 3 is connected to the hip joint movement module 5, the hip joint movement module 5 is connected to the waist and the support frame 5, and the crutch module 6 is independent of the exoskeleton body.
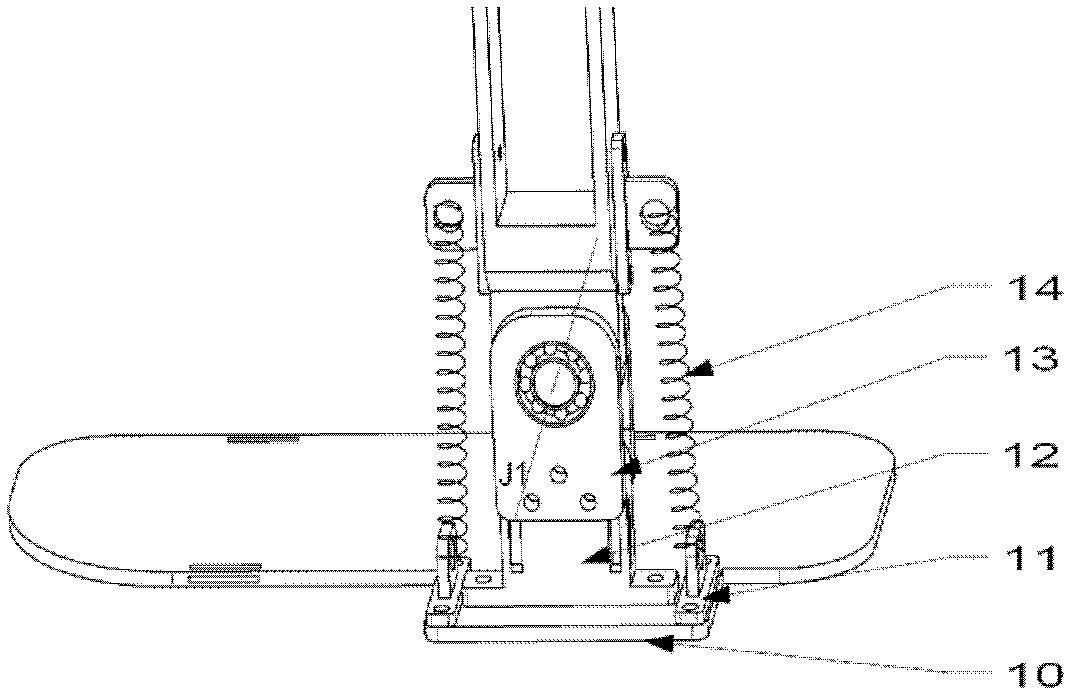
[0025] Such as figure 2 As shown, the ankle joint movement module 1 includes: a foot 10, a spring plate 11, an ankle joint support 12, an ankle joint fixing plate 13, and a tension spring 14, wherein: the ankle joint support 12 is fixed on the foot 10, The ankle joint fixing plate 13 is fixed on the ankle joint support 12 by screws, the ankle joint fixing plate 13 is connected with the cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More