

Moving robot obstacle avoiding method based on laser range finder
A mobile robot, laser rangefinder technology, applied in the direction of instruments, measuring devices, mapping and navigation, can solve the problems of collision obstacles, threshold sensitivity, danger, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The method will be described below with specific examples in conjunction with the accompanying drawings.
[0023] In this example, the robot can move independently, the base of the robot is close to a circle, and the laser range finder is used as the main environmental detection sensor.
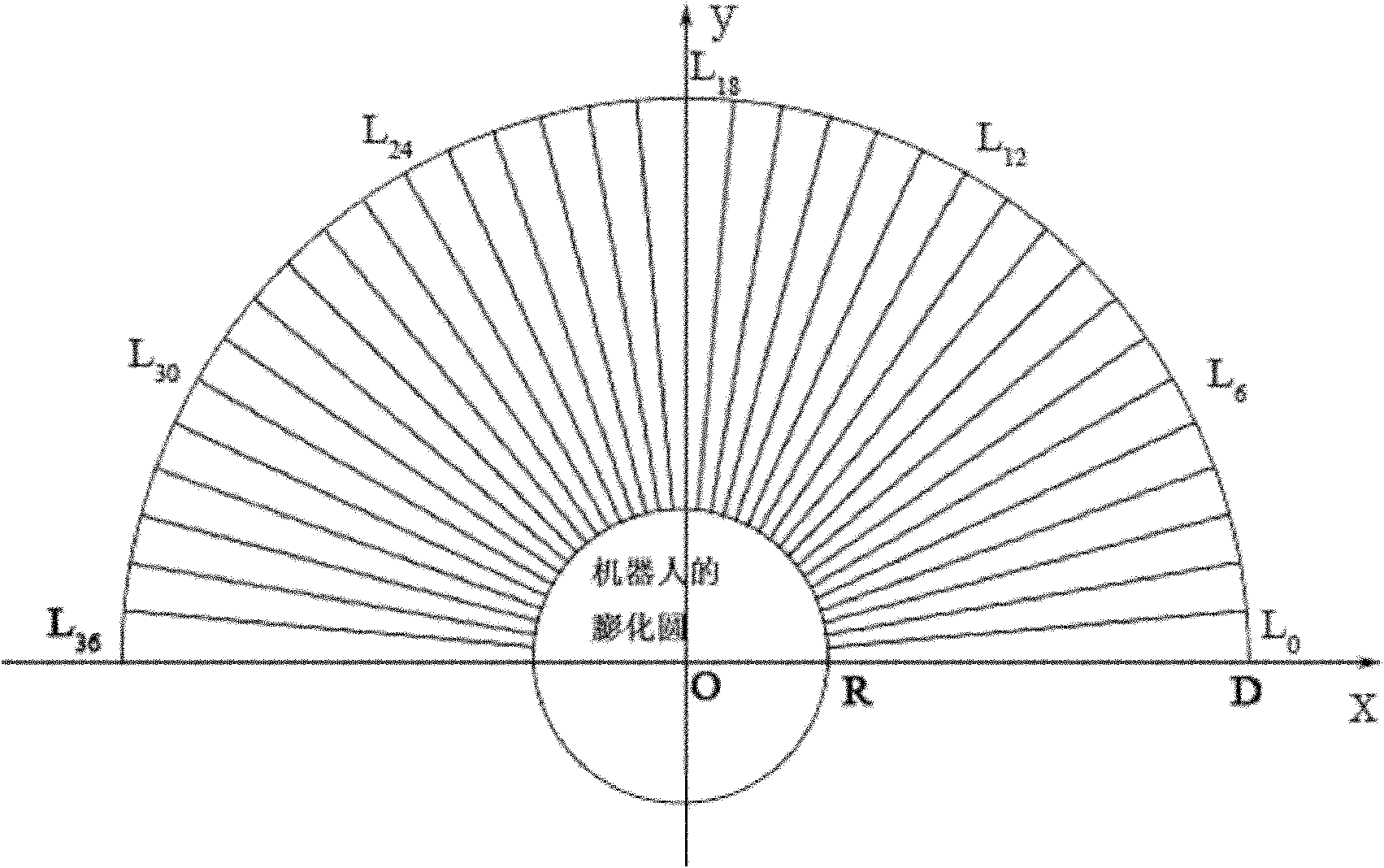
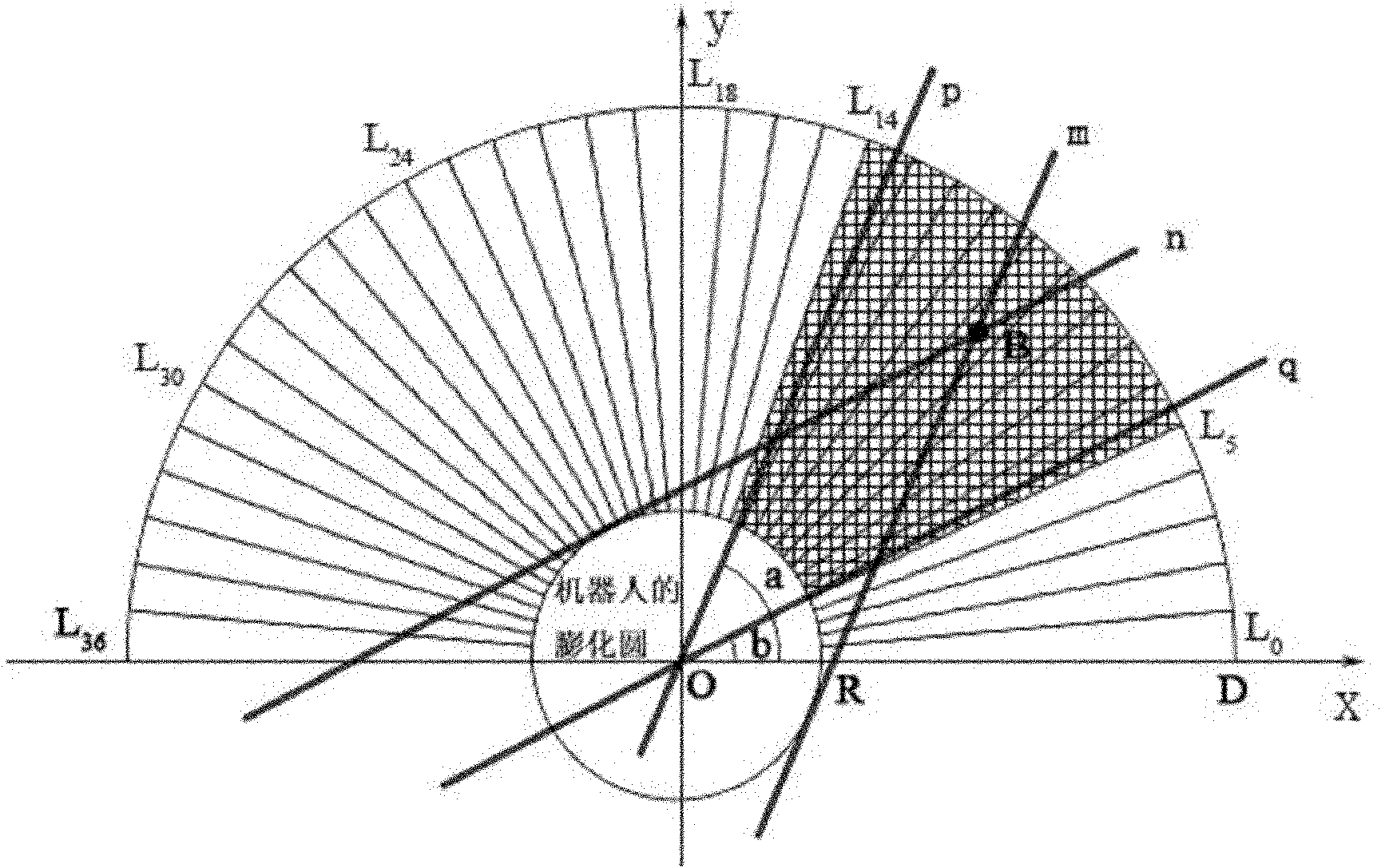
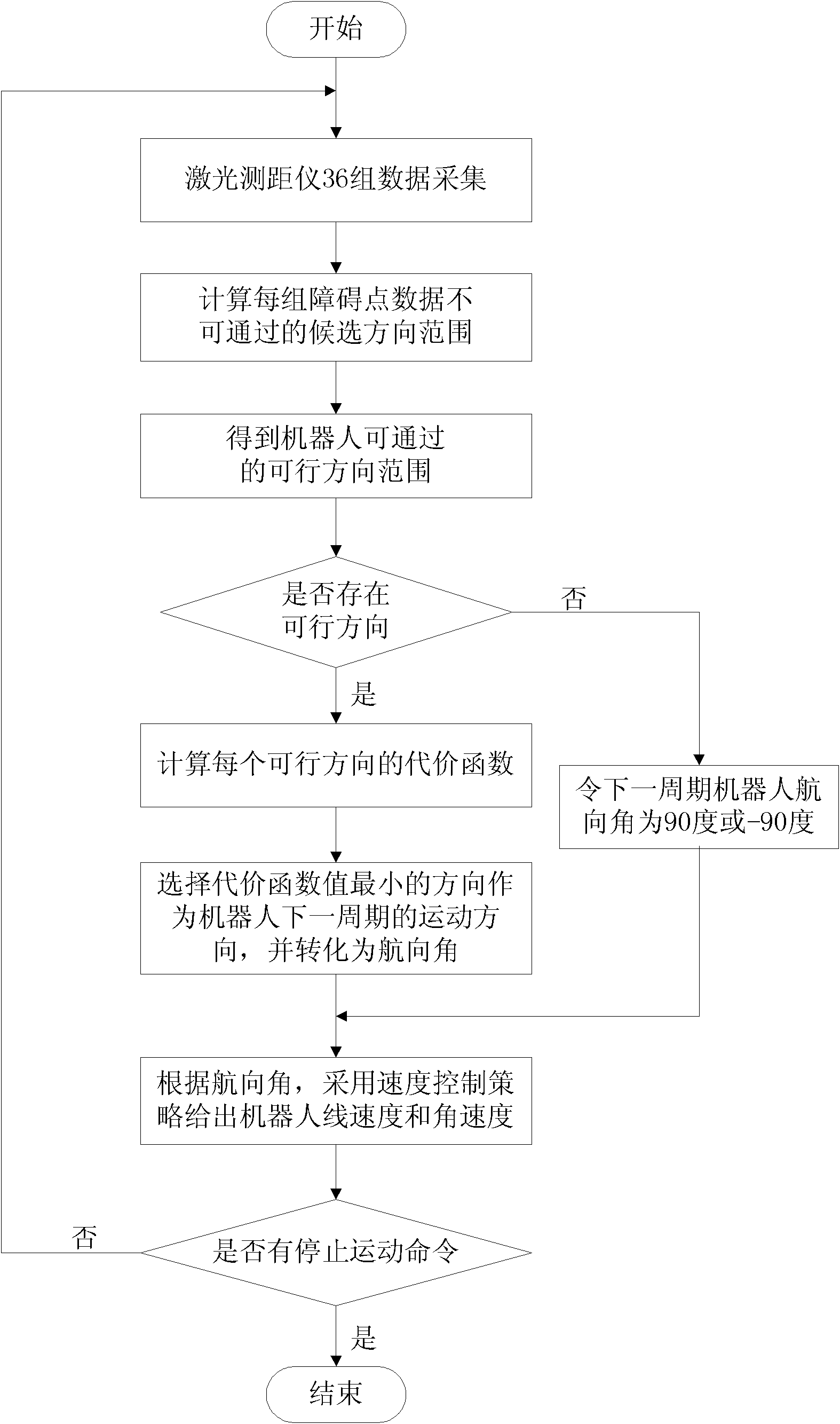
[0024] The obstacle avoidance method of the mobile robot based on the laser range finder of the present invention is as follows: image 3 shown, including the following steps:
[0025] 1) Take the current position of the robot as the origin, the robot heading as the Y axis, and establish the robot coordinate system with the direction perpendicular to the Y axis as the X axis. The semicircle of D is used as the active window, with the origin of the coordinate system as the starting point, within the range of 180 degrees from the positive semi-axis of the X-axis to the negative semi-axis counterclockwise, N rays of simulated laser emission at equal angles are used as candidate direction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More