

Four-feet walker
A walker and drive branch chain technology, applied in the field of robots, can solve the problems of low average force or torque transmission efficiency, great influence on dynamic performance, etc., and achieve the effect of fast walking speed, small motion inertia, and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
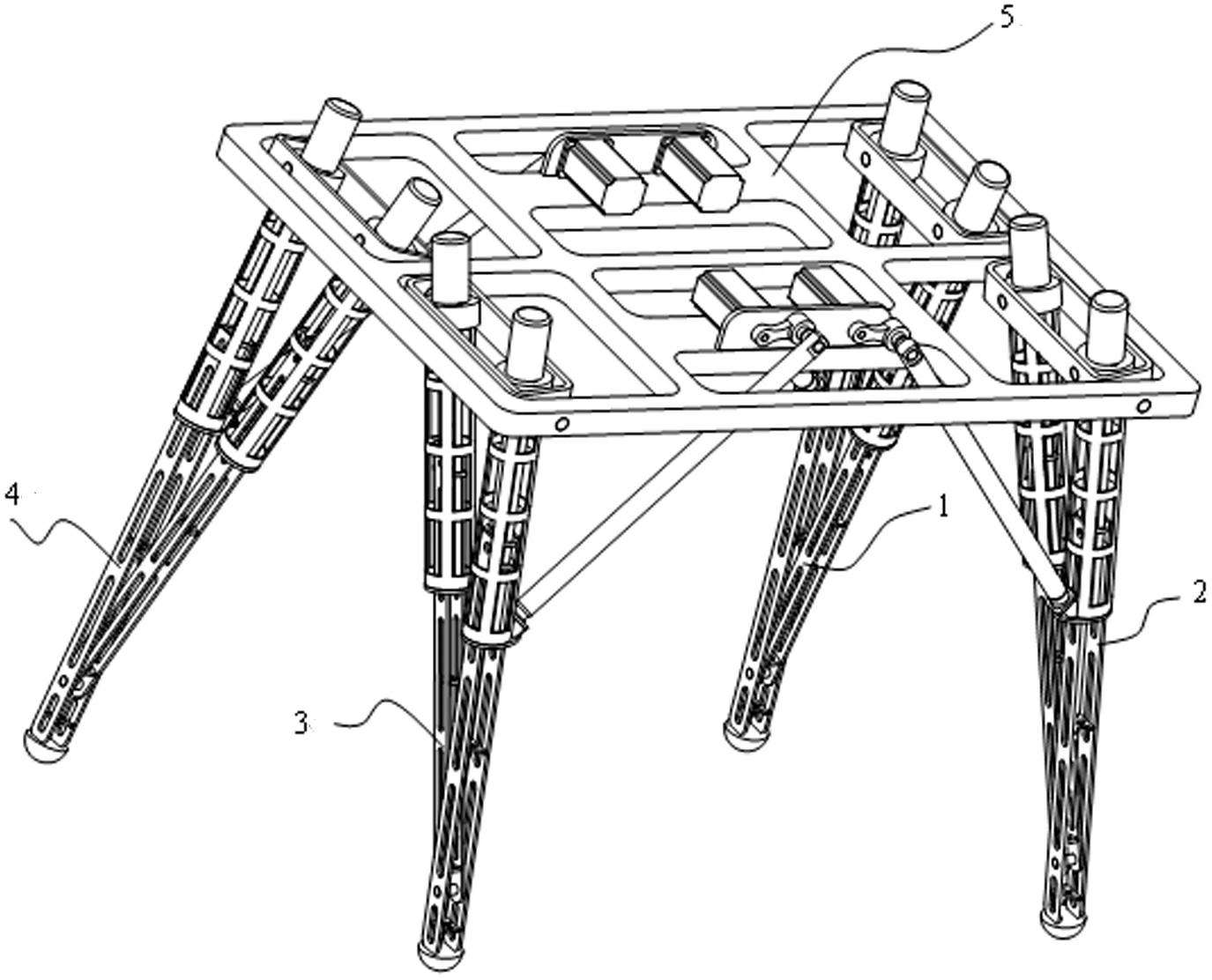
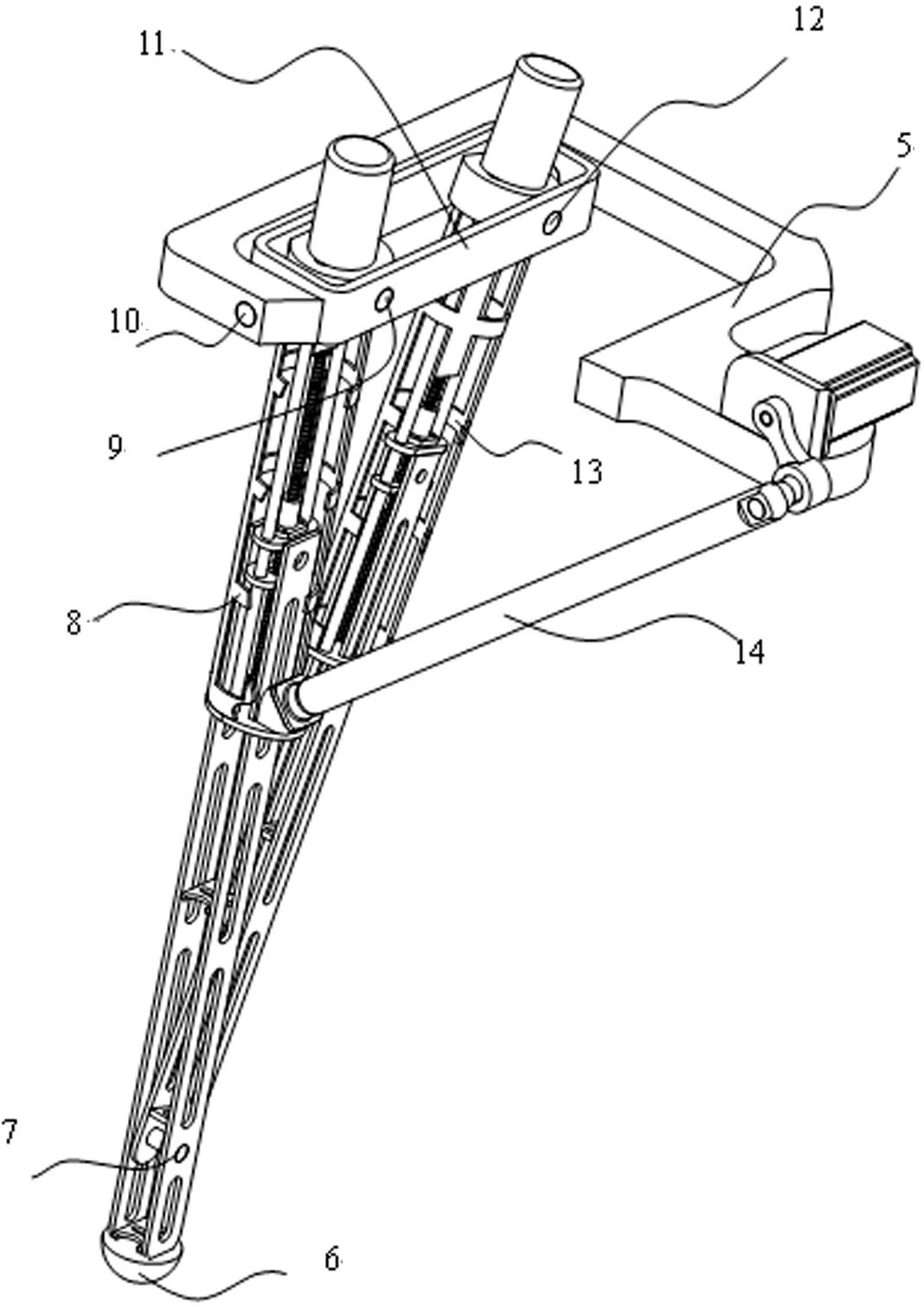
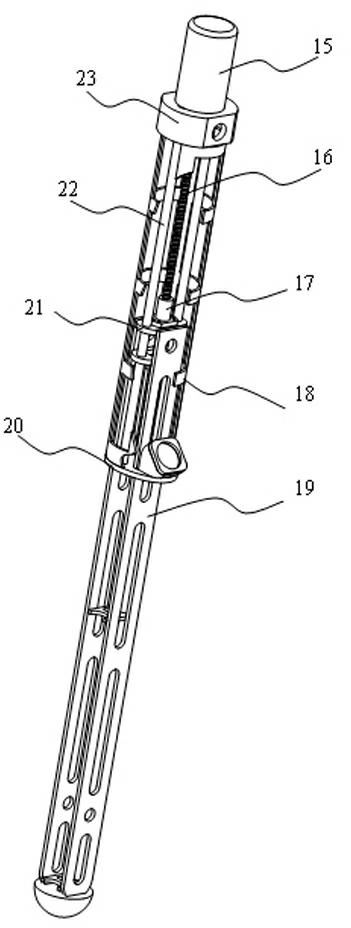
[0010] exist figure 1 , figure 2 , image 3 with Figure 4 In the schematic diagram of a quadruped walker shown, four mechanical legs 1 , 2 , 3 , 4 with the same structure are connected to the four corners of the frame 5 . The frame is provided with through holes to facilitate the connection of the mechanical legs and reduce the weight. Described mechanical leg mainly comprises rectangular annular part 11, the first drive branch chain 8, the second drive branch chain 13, the 3rd drive branch chain 14 and hemispherical elastic toe 6; The sleeve of described first drive branch chain The two ends of the barrel 18 are fixedly connected with the upper and lower connectors 23, 20 of the sleeve respectively. The first motor 15 is installed on the upper connector of the sleeve. The rotating shaft of the first motor is fixedly connected with one end of the ball screw 16. The ball screw The other end of the nut is provided with a nut 17, and the nut is installed on the slider 21. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More