

On-line self-calibrating method based on inertial navigation system
A technology of an inertial navigation system and a calibration method, which is applied in the field of online autonomous calibration of a strapdown hybrid system of a fiber optic gyro platform, and can solve the problems that the angle between the roll axis and the horizontal plane cannot be eliminated.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Further description will be made below in conjunction with the accompanying drawings.
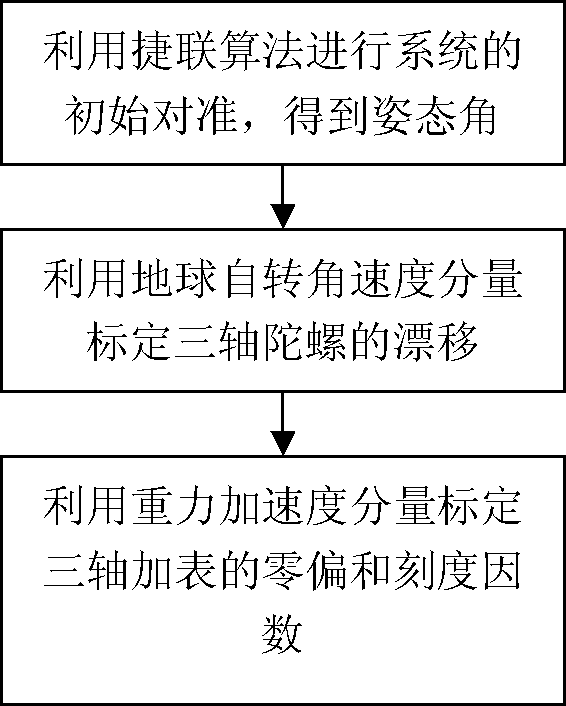
[0071] An online self-calibration method based on an inertial navigation system, the specific steps of the method are as follows:
[0072] Step 1: Inertial Navigation System Initial Alignment
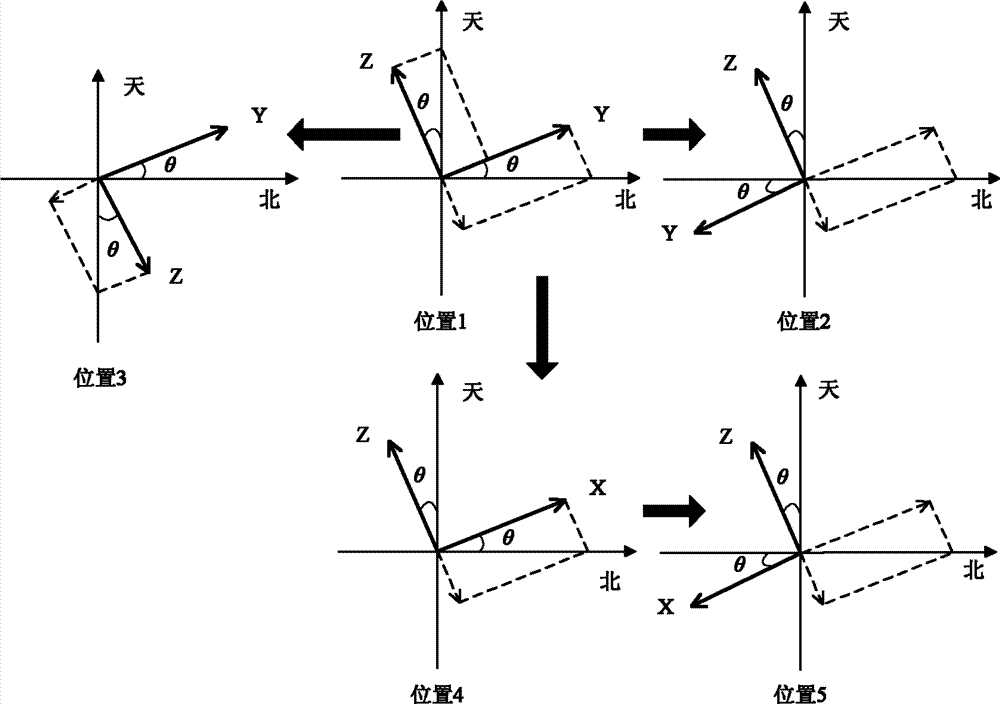
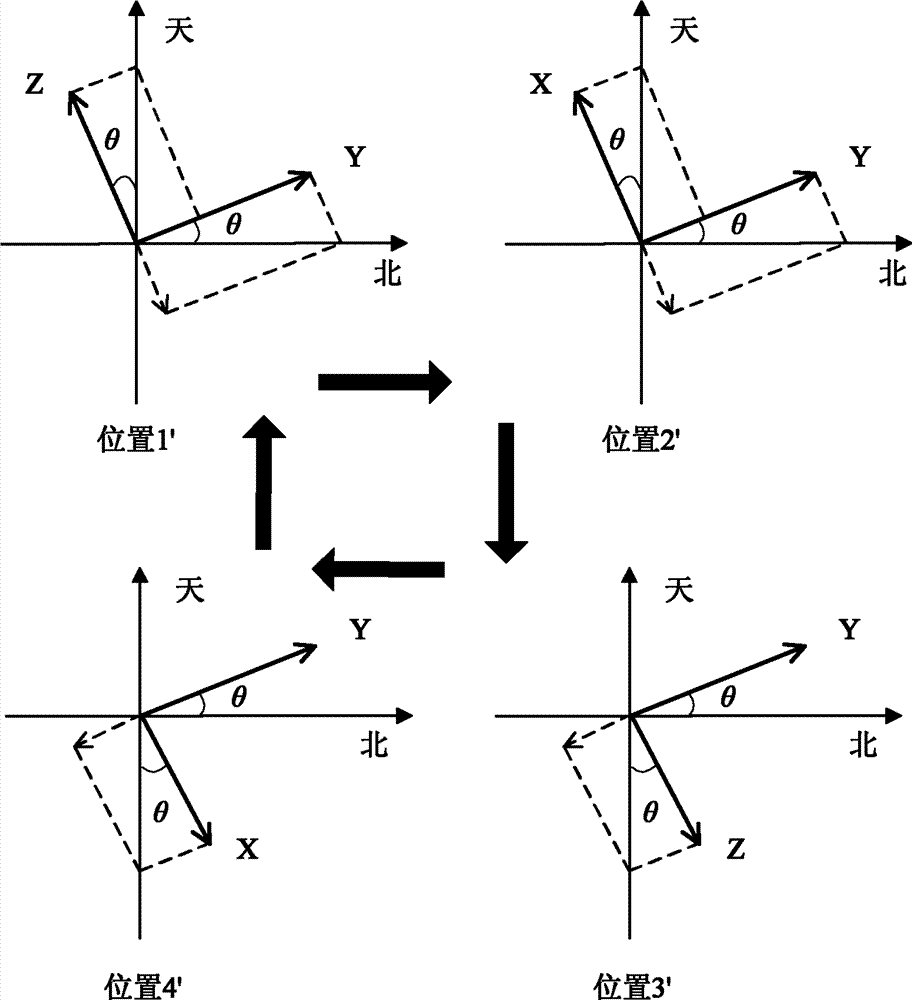
[0073] For the dual-axis rotation modulation inertial navigation system, the strapdown algorithm is used for initial alignment to obtain the initial attitude angles of the three axes; the loop composed of the angle sensor and the servo motor on the rotating shaft is used to control the rotation of the azimuth axis, so that the north direction The projection of the roll axis of the gyro on the horizontal plane points to the true north; then the circuit is used to control the rotation of the roll axis so that the pitch axis of the east-facing gyro points to the true east;
[0074] According to the initial attitude angle and the rotation angle of the azimuth axis and roll axis controlled by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More