

Lane departure alarm system based on lane line model detection method and on-line study method
A lane departure warning and model detection technology, applied in the field of intelligent transportation and intelligent vehicle research, can solve problems such as system failure and meaning, vehicle departure from lane, traffic accidents, etc., and achieve the effect of reducing potential traffic accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0036] Embodiment 1 provides a detailed description of the hardware structure of the signal layer:
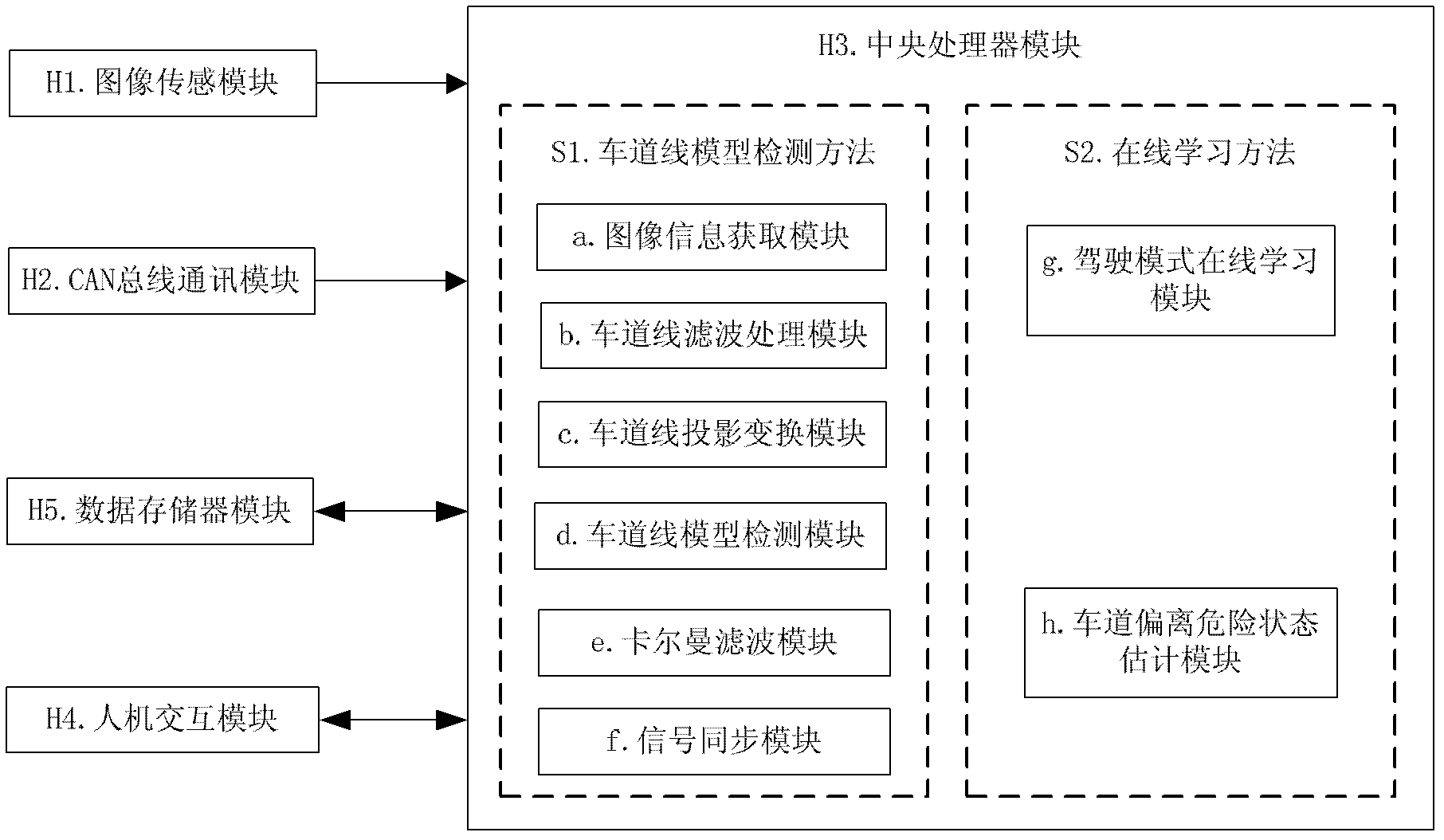
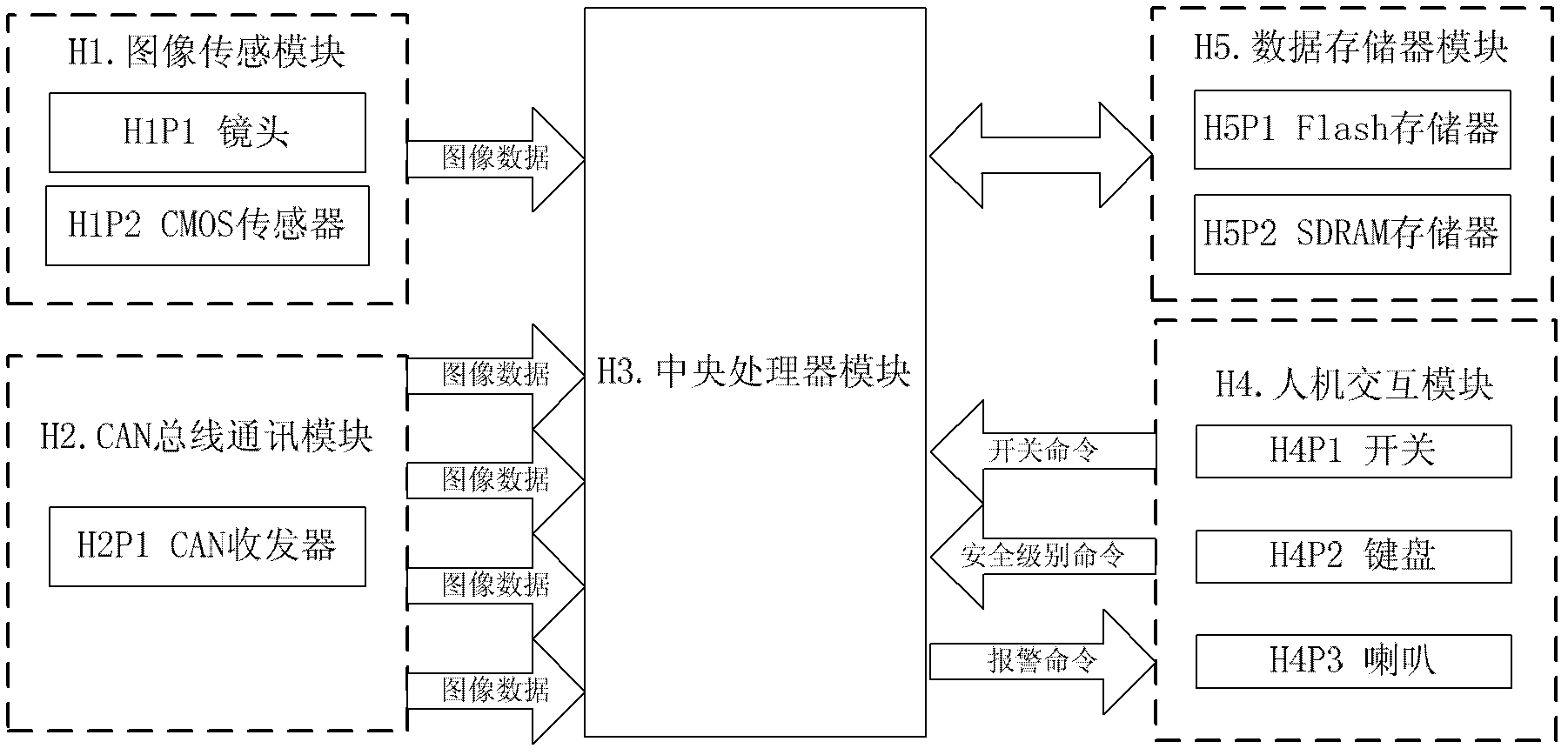
[0037] A lane departure warning system based on a lane line model detection method and an online learning method. The hardware system includes: an image sensing module (H1), which is used to obtain image data in front of the car in real time; a CAN bus communication module (H2), which communicates with the car CAN The bus communicates to obtain vehicle speed signals, turn signal signals, brake signals, and accelerator signals in real time; the central processing unit module (H3) provides a computing platform for the lane line model detection method (S1) and online learning method (S2), man-machine Interactive module (H4), this module includes a switch, two adjustment buttons, LED display and horn, the switch is used to turn on and off the lane departure warning system, the two adjustment buttons are used to set the danger warning level, and the LED display is used to display Th...
Embodiment 2
[0042] Embodiment 2 provides a detailed description of each module of the detection layer:
[0043] A lane departure warning system based on a lane line model detection method and an online learning method. The software system includes: a lane line model detection method (S1), which is used to detect the lane line in front of a car in real time and calculate the relative distance between the lane line and the car. Position; online learning method (S2), through which the state of the car's lane departure is learned online, effectively distinguishing the lane departure state caused by the driver's conscious lane change operation and the lane departure caused by the driver's unconscious driving of the car from the lane state, and through the learning results, the second lane departure state is given an early warning. Among them, this embodiment describes the implementation method of the lane line model detection method (S1).
[0044] Image information acquisition module (a): Thi...
Embodiment 3
[0067] Embodiment 3 provides a detailed description of each module of the decision-making layer:
[0068]The schematic diagram of the decision-making layer (L3) of the present invention's design is as attached Figure 5 As shown, it includes a driving mode online learning module (f) and a lane departure risk state estimation module (g). Wherein, the driving mode online learning module (f) includes a lane departure judging module (FP1) and an online learning module (FP2). The lane departure dangerous state estimation module (g) includes a dangerous level calculation module (GP1) and an alarm decision (GP2).
[0069] Lane Departure Judgment Module (FP1): First, this module uses the internal parameters and external parameters calibrated by the camera to calculate the positional relationship between the lane line and the vehicle in the three-dimensional space coordinate system, such as Figure 8 shown. Then, calculate the lane departure rate according to formula (8):
[0070] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More