

Method and device for measuring pixel pitch of image sensor based on point-target image splicing technology
An image sensor, pixel pitch technology, applied in measurement devices, optical devices, instruments, etc., can solve problems such as defocusing, and achieve the effects of improving repeatability, reducing errors, and amortizing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
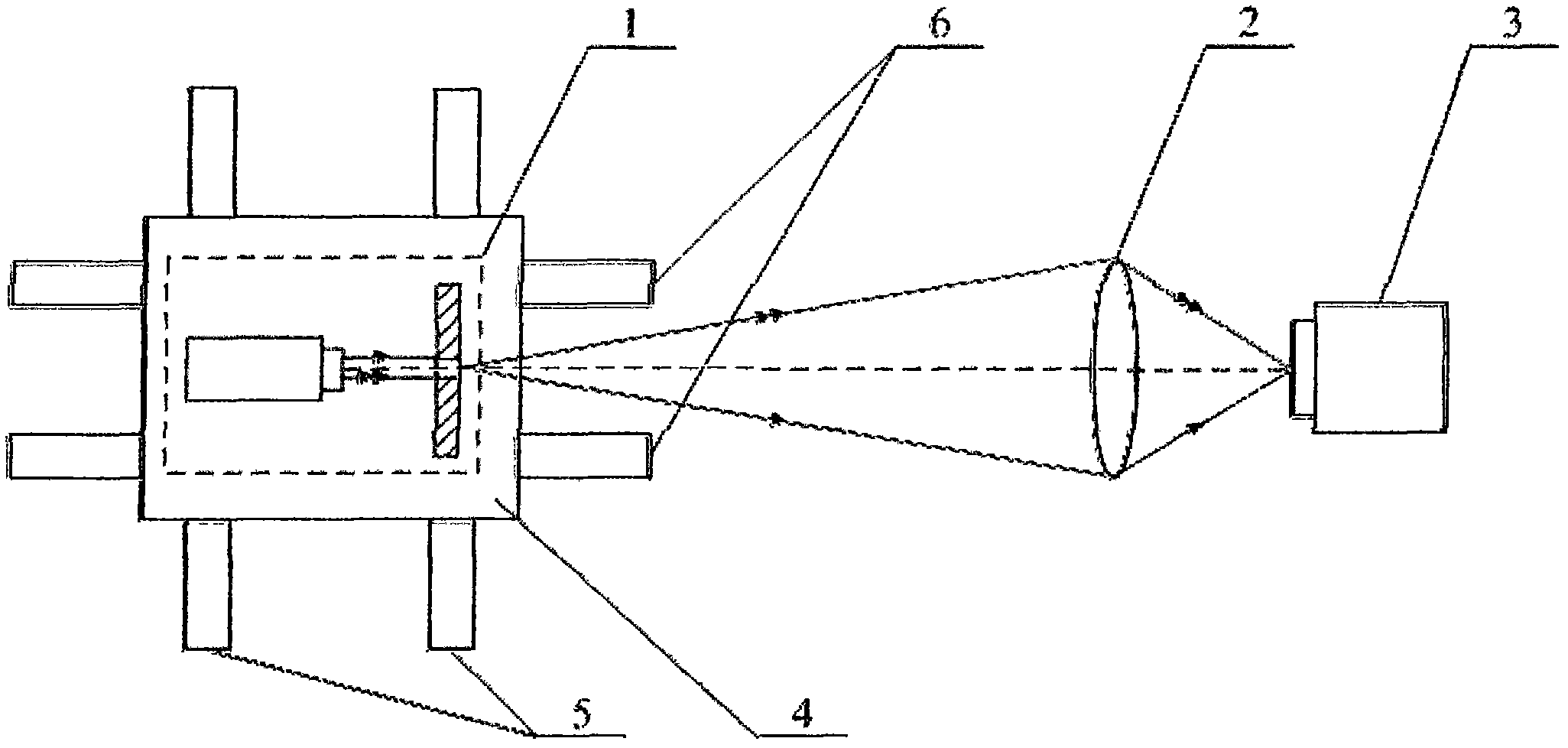
[0068] figure 1 It is a structural schematic diagram of an image sensor pixel pitch measuring device that uses a point target image stitching; the device includes a point target 1, an optical system 2, an image sensor 3, a slider 4 and a first guide rail 5 perpendicular to the optical axis direction, and the point target 1 is imaged onto the surface of the image sensor 3 through the optical system 2; and, the device also includes a second guide rail 6 along the optical axis direction, and the slider 4 carrying the point target 1 is installed on the first guide rail 5 and the second guide rail 6, and the slide The movement of the block 4 on the first guide rail 5 cooperates with the movement of the slider 4 on the second guide rail 6, so that the point target 1 is in-focus and imaged on the surface of the image sensor 3 at any posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More