

Clamping type integral shrinking and overturning climbing robot
A clamping and robotic technology, which is applied in the field of climbing robots, can solve the problems of high labor intensity, high degree of danger, and difficulty in obtaining reliable guarantees for personal safety, etc., to achieve large clamping force, reduce power loss, reduce Effect of Small Longitudinal Displacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in more detail below in conjunction with accompanying drawing example:
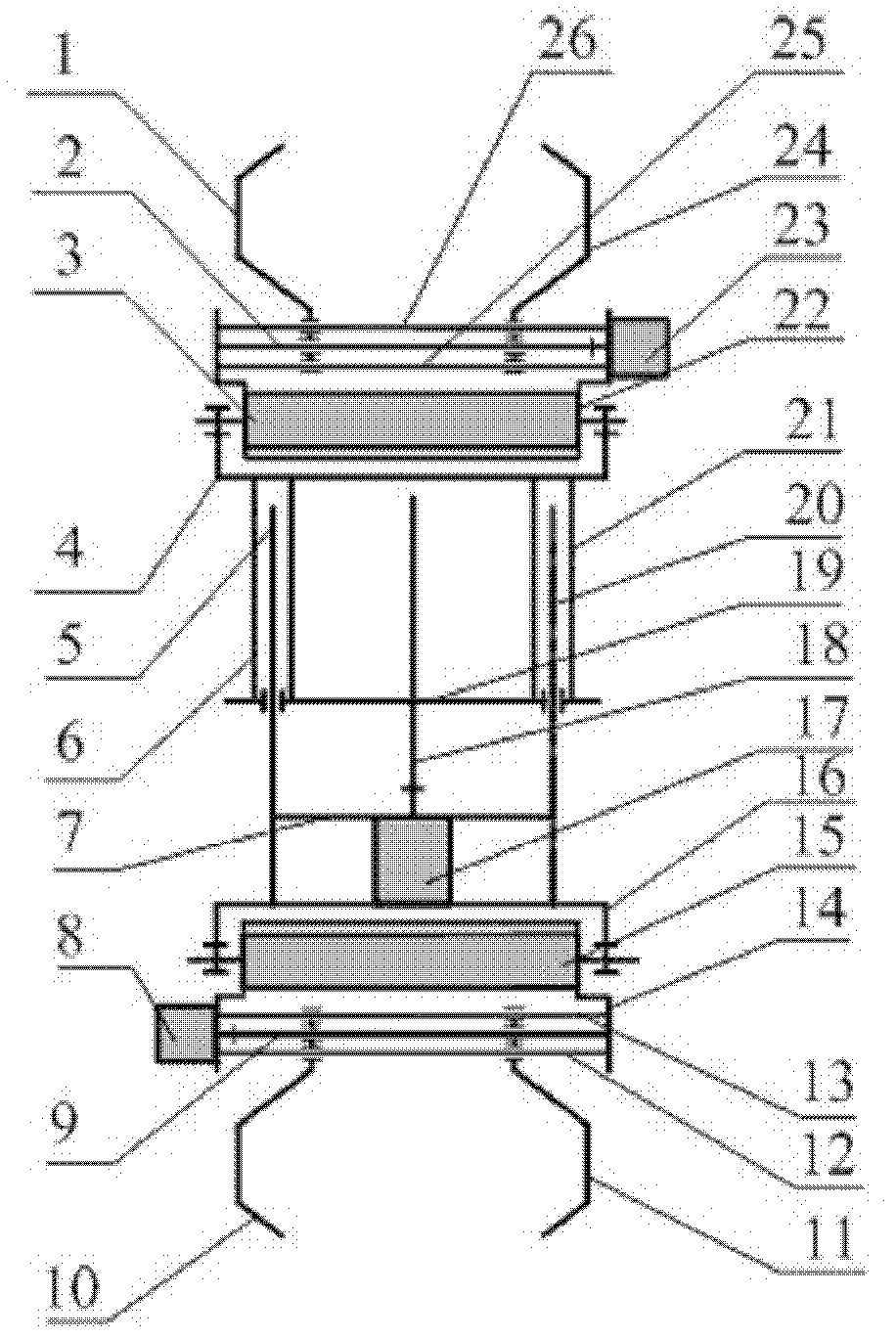
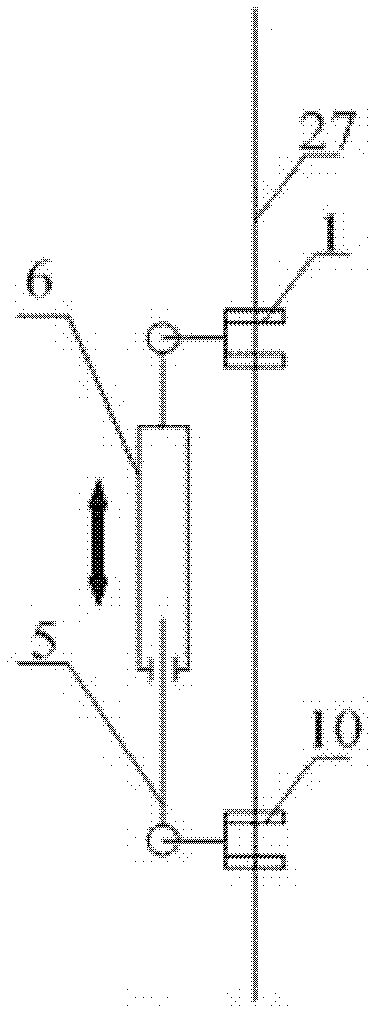
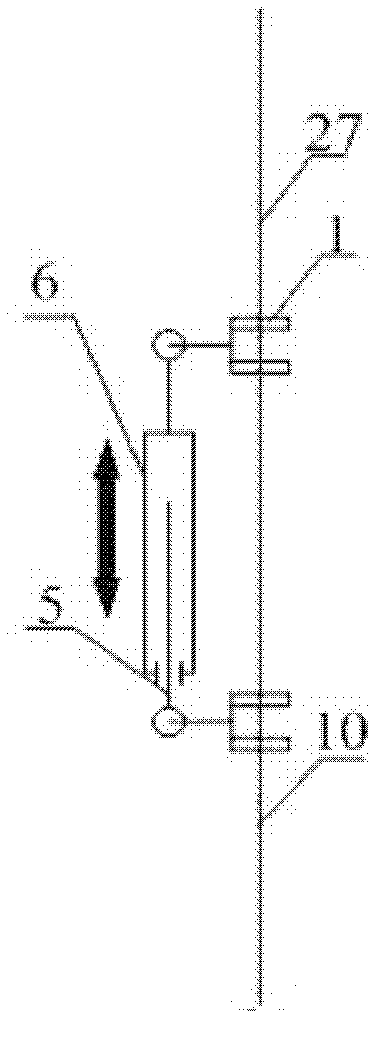
[0022] combine figure 1 ~6, the parts that the present invention comprises: robot mainly is by clamping claw 1,10,11,24, telescoping motor 17, overturning motor 3,15, claw clamping motor 8,23, claw lead screw 2, 9, leading screw 18, overturn frame 4,16, telescoping mechanism 5,6,20,21 form.
[0023] The present invention adopts the following technical scheme: the clamping part is composed of the clamping claw I1, the clamping claw IV22, the claw screw I2 and the clamping motor II21. Clamping jaw I1 and clamping jaw IV24 adopt sliding fit installation method with guide shaft III25 and guide shaft IV26, see figure 1 . The clamping motor frame II22 is fixedly connected with the overturning motor I3. The clamping motor II23 is installed at the center of the clamping motor frame II22 see figure 1 And it is fixedly connected with the claw lead screw I2 through a sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More