

Motion trajectory planning method of mechanical arm of humanoid robot for preventing collision
A humanoid robot and motion trajectory technology, applied in the field of robotics, can solve problems such as not fundamentally solving the collision problem, and achieve the effect of satisfying joint limit and avoiding singular configuration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with accompanying drawing.
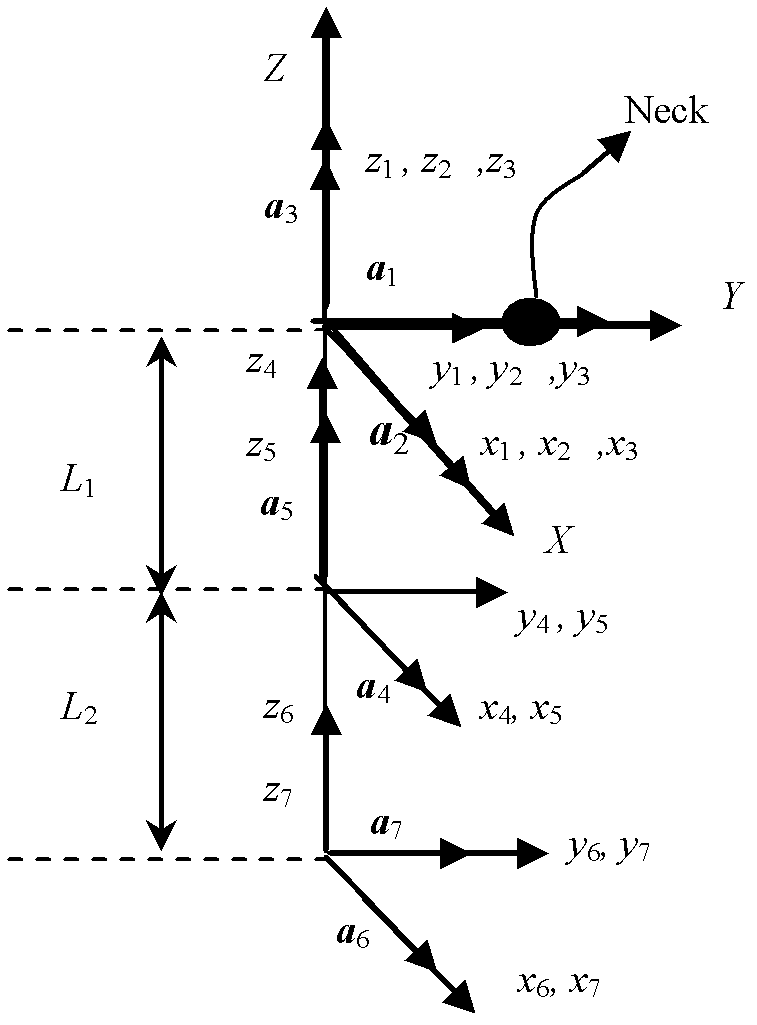
[0023] Step 1: Model the desktop according to the relative position of the desktop and the robot.
[0024] Such as figure 1 Shown is a simple model of the right mechanical arm of a humanoid robot, where a i , i=1~7 is the axial direction vector of each joint, (X, Y, Z) is the world coordinate system, (x i ,y i ,z i ), i=1~7 is the local coordinate system of each joint. In the world coordinate system, the table is established as an area below the plane. That is, according to the height of the desktop and the height of the center of the shoulders, the description of the plane where the desktop is located in the world coordinate system can be calculated as z=cons tant.
[0025] Step 2: Collision detection and classification.
[0026]Convert the initial pose and target pose in Cartesian space into the initial joint angle sequence and the target joint angle sequence in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More