

Virtual hand grasp simulating method based on motion capture
A simulation method and motion capture technology, applied in the field of virtual reality, can solve the problems of long production cycle and increased cost, and achieve the effect of quantity simplification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052]In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
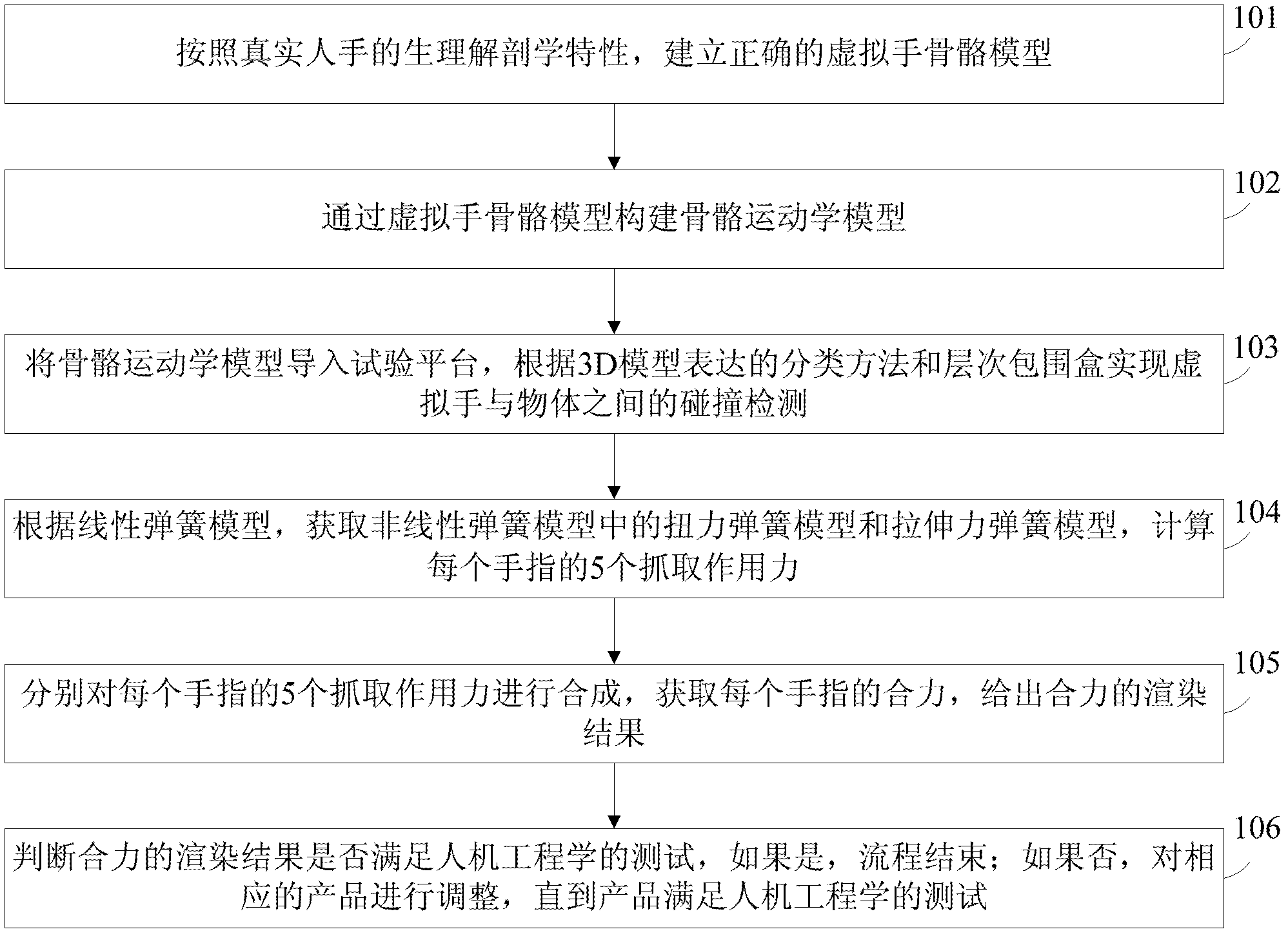
[0053] In order to shorten the production cycle and reduce the cost of the product, the embodiment of the present invention provides a simulation method of virtual hand grasping based on motion capture, see figure 1 , see the description below:
[0054] A kind of simulation method based on motion capture virtual hand grasping, this method comprises the following steps:
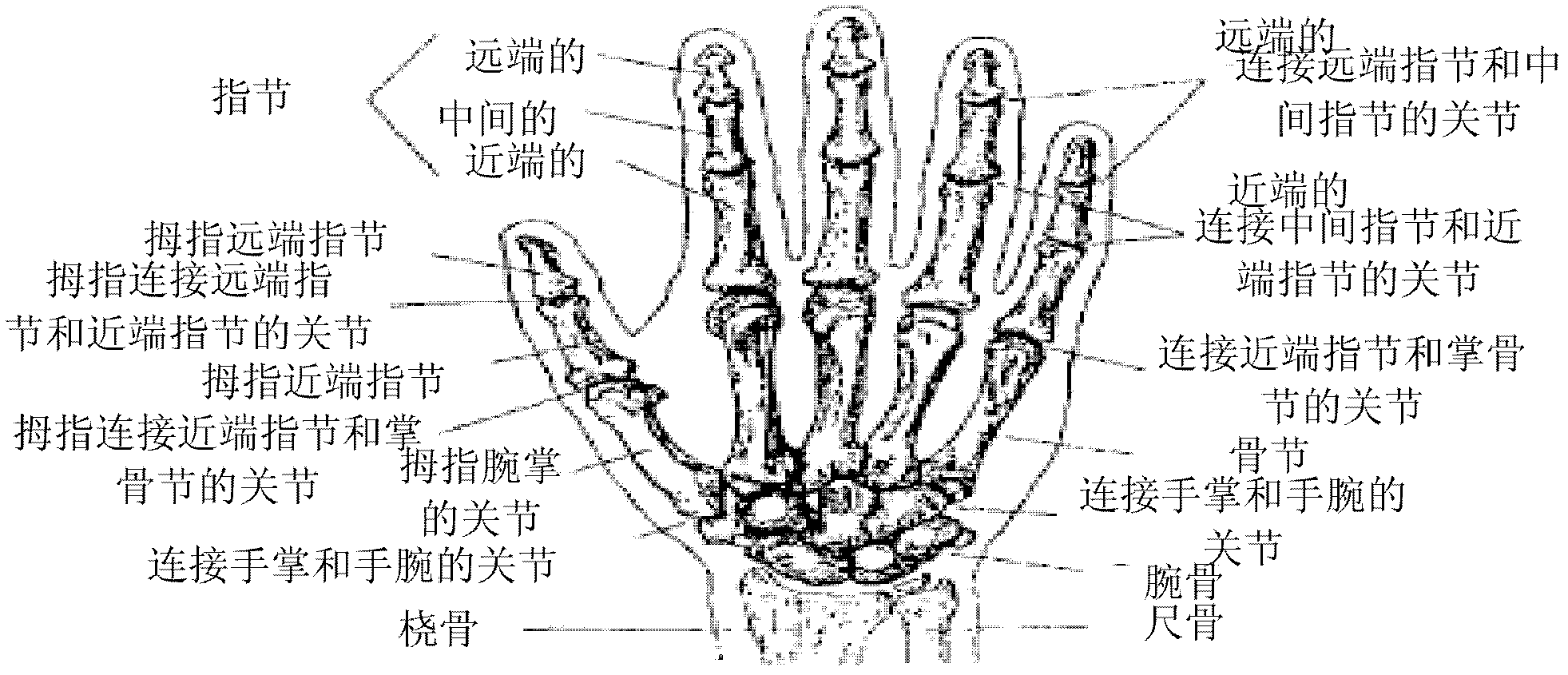
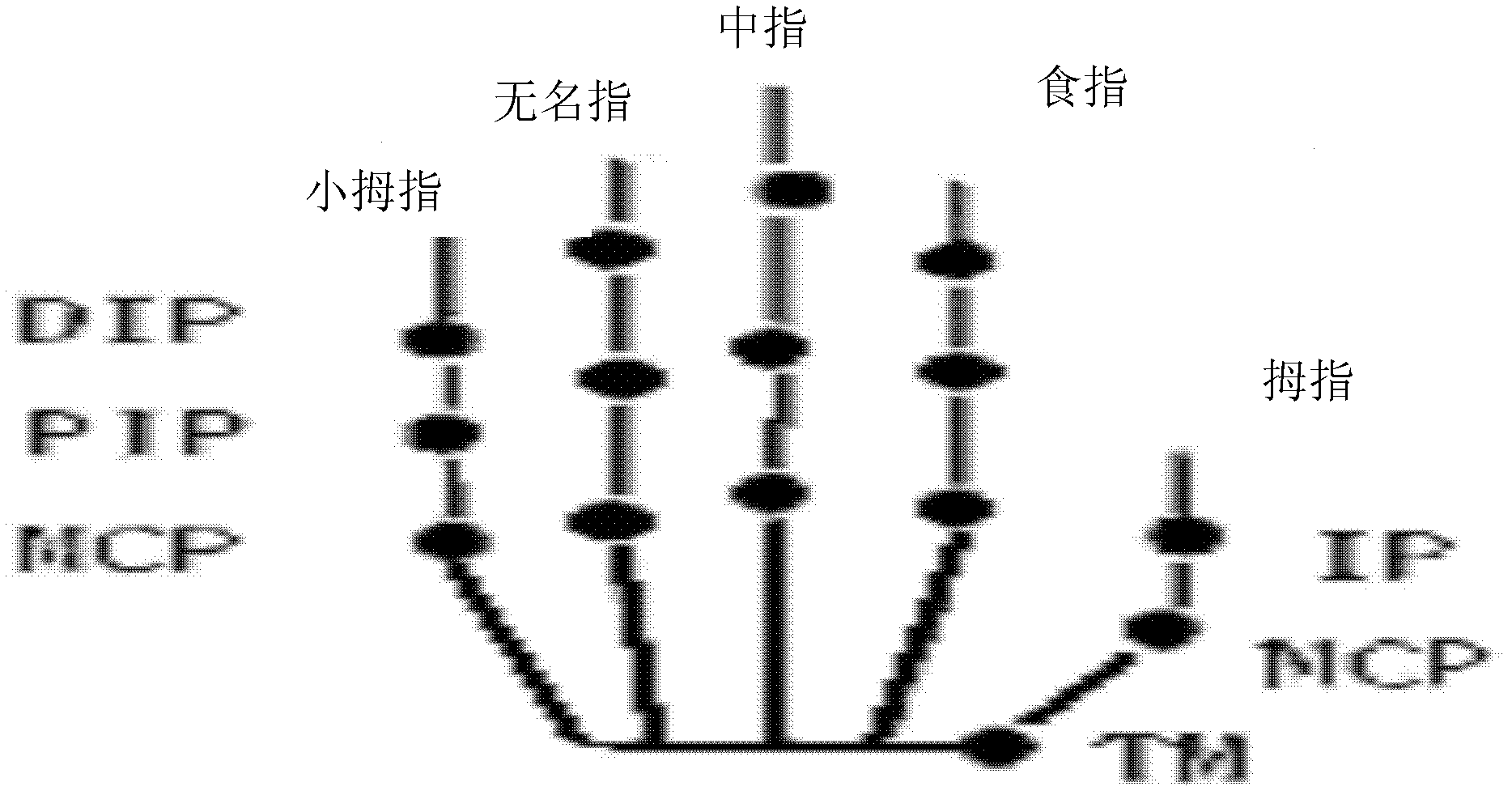
[0055] 101: Establish a correct virtual hand skeleton model according to the physiological and anatomical characteristics of the real human hand;
[0056] Among them, see figure 2 , in order to establish a reasonable human hand model in the computer and play an important role in practical applications, it is necessary to establish a correct virtual hand skeleton mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More