

Drive control device of alternating-current motor
A technology of AC motors and motors, applied in the direction of AC motor control, motor vibration suppression control, AC induction motor traction, etc., to achieve the effect of avoiding switching surges
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0033] figure 1 It is a diagram showing a configuration example of the AC motor drive control device 100 according to Embodiment 1 or 2 of the present invention. figure 1 The drive control device 100 of the AC motor shown is composed of, as a main structure, a power collector 1 connected to an overhead line to receive power; a wheel 3 connected to a rail 2 to drive an electric vehicle; The power open circuit contactor LB of the closed part receives power from the power collector 1 and performs switching of the main circuit on the power supply side; the inverter INV performs the conversion of the DC power received through the positive side conductor P and the negative side conductor N to the AC power supply. Power conversion of power; capacitor FC, both ends of which are connected to the positive side conductor P and the negative side conductor N; the U-phase conductor UI of the inverter side, the V-phase conductor VI of the inverter side, and the W-phase conductor WI of the in...
Embodiment approach 2
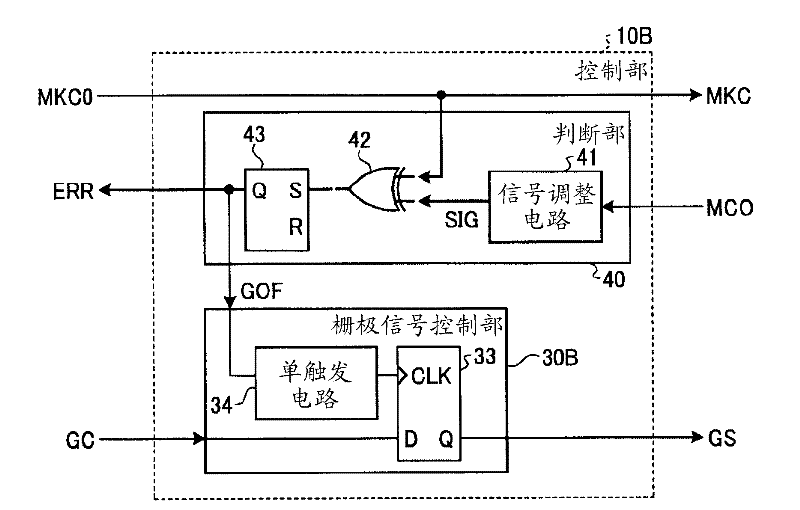
[0062] Figure 13 It is a figure which shows the structural example of the control part 10B in Embodiment 2 of this invention, Figure 14 It is a sequence diagram showing the operation of Embodiment 2 of the present invention. Such as Figure 13 As shown, the structure of the second embodiment differs from that of the first embodiment in the internal structure of the gate signal control unit 30B. Hereinafter, only the parts different from Embodiment 1 will be described.
[0063] First, the configuration of the gate signal control unit 30B will be described. The gate signal control unit 30B is configured to include a one-shot circuit 34 and a D-type flip-flop circuit 33 . The signal GOF output from the judging unit 40 for judging the inconsistency of the operation is input to the one-shot circuit 34, and the output of the one-shot circuit 34 and the basic gate signal GC input from the upper system control unit (not shown) of the control unit 10B are input. To the D-type bi...
Embodiment approach 3
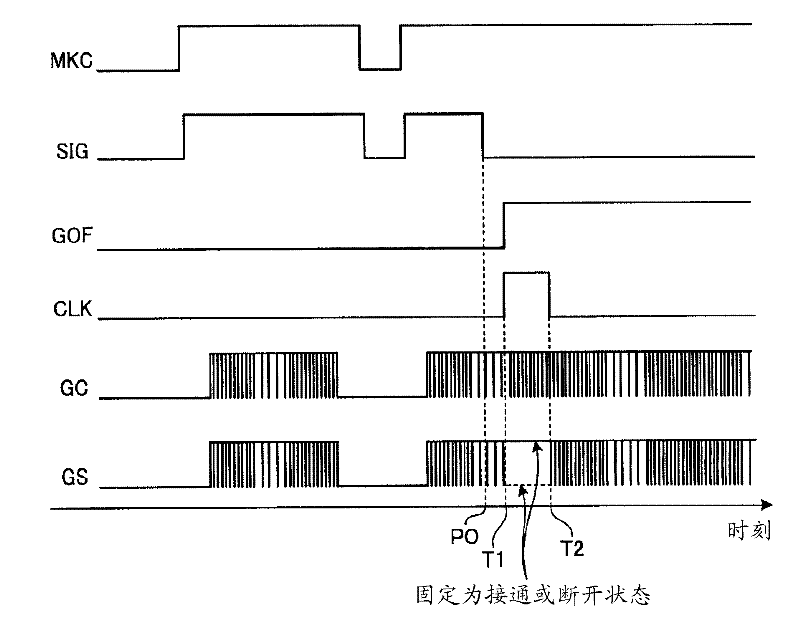
[0069] As in Embodiment 2, when the ON or OFF state of the switching operation is temporarily maintained, a voltage asynchronous to the rotation of the AC motor is applied to the AC motor, and an overcurrent or a torque surge may occur. Therefore, in the third embodiment, the inverter control unit 70 controls the switching state of the inverter INV to be in the zero-voltage vector state (the combination of the switching elements UP, VP, and WP on the upper arm side) during the period from time T1 to T2. All are on and the UN, VN, WN groups on the lower arm side are all off, or the opposite state). In addition, it is preferable to control all switching elements to be turned off after time T2.
[0070] In the case of the above configuration, not only the same effect as that of Embodiment 2 can be obtained, but also since the voltage applied to the AC motor can be made zero between times T1 and T2, it has the advantage of being able to suppress torque surges and overcurrents. Ef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More