Yarn-grabbing robot
A robot and motion system technology, which is applied in the direction of manipulators, textile processing machine accessories, program control manipulators, etc., can solve the problems of inability to adjust the posture and meet the requirements of the use of two-claw manipulators, and achieve strong versatility and convenient installation and maintenance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
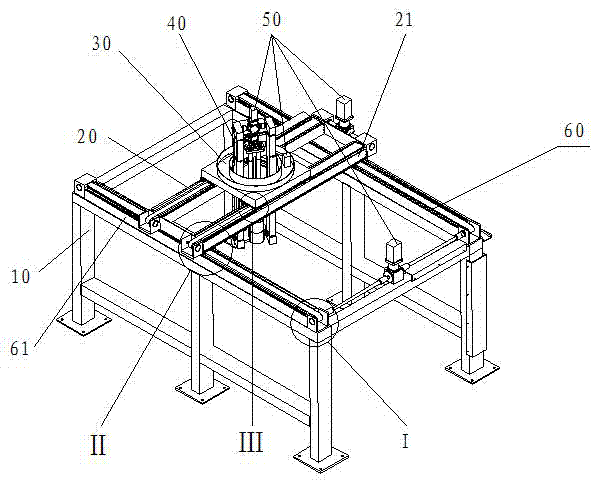
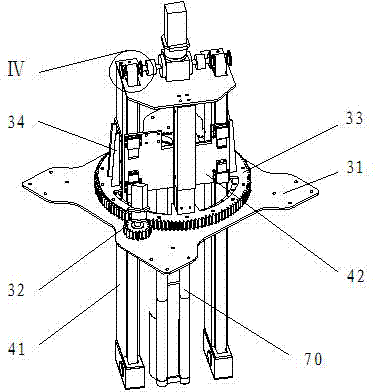
[0022] The yarn grabbing robot according to the present invention comprises a support 10, an X-axis motion system 60 arranged on the support 10, a Y-axis motion system 20 connected with the X-axis motion system 60, and an A-axis rotary motion connected with the Y-axis motion system 20 System 30 , Z-axis motion system 40 connected to A-axis motion system 30 , drive system 50 to drive X-axis motion system 60 , Y-axis motion system 20 , Z-axis motion system 40 and A-axis rotary motion system 30 to move.
[0023] Such as figure 1 and figure 2 As shown, the yarn grabbing robot in this embodiment is a four-axis motion system, that is, an X-axis motion system 60 , a Y-axis motion system 20 , an A-axis motion system 30 , and a Z-axis motion system 40 . T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com