

Fine anti-interference tracking controller of flexible hypersonic vehicle
A tracking controller, hypersonic technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of inaccurate models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
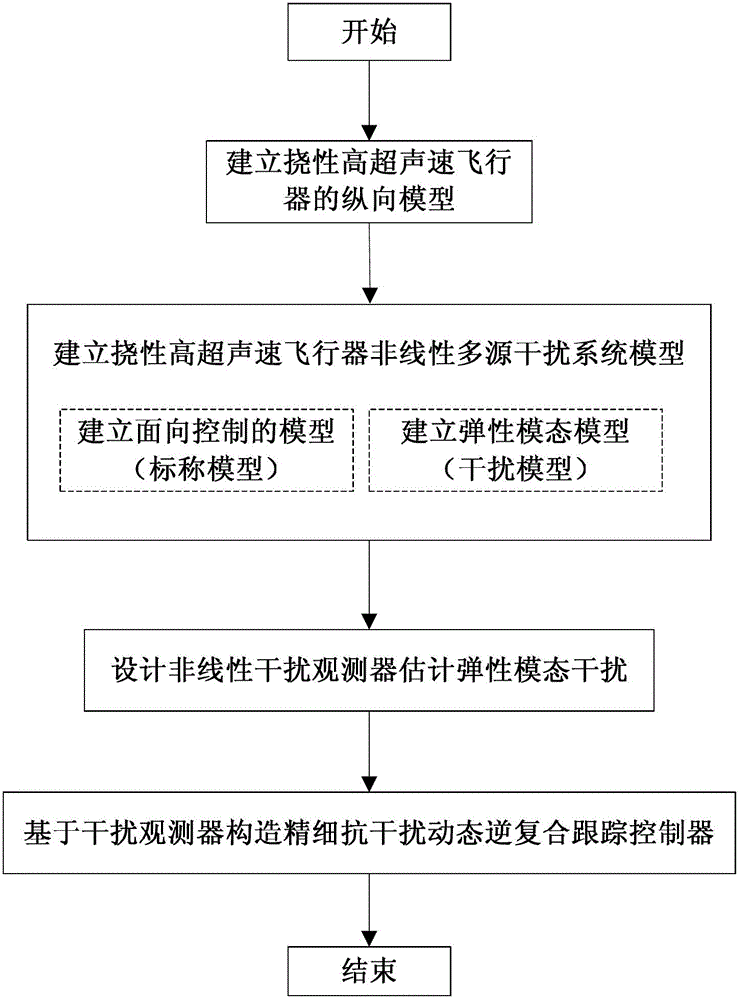
[0057] The design steps of the fine anti-jamming tracking controller of a flexible hypersonic vehicle of the present invention are: firstly establish the longitudinal model of the flexible hypersonic vehicle; secondly, establish the nonlinear multi-source interference of the flexible hypersonic vehicle based on the longitudinal model System model; again based on the multi-source interference system model, a nonlinear interference observer is constructed to estimate and compensate the elastic modal interference; finally, a fine anti-interference dynamic inverse tracking controller is constructed based on the nonlinear interference observer; the specific implementation steps are as follows:
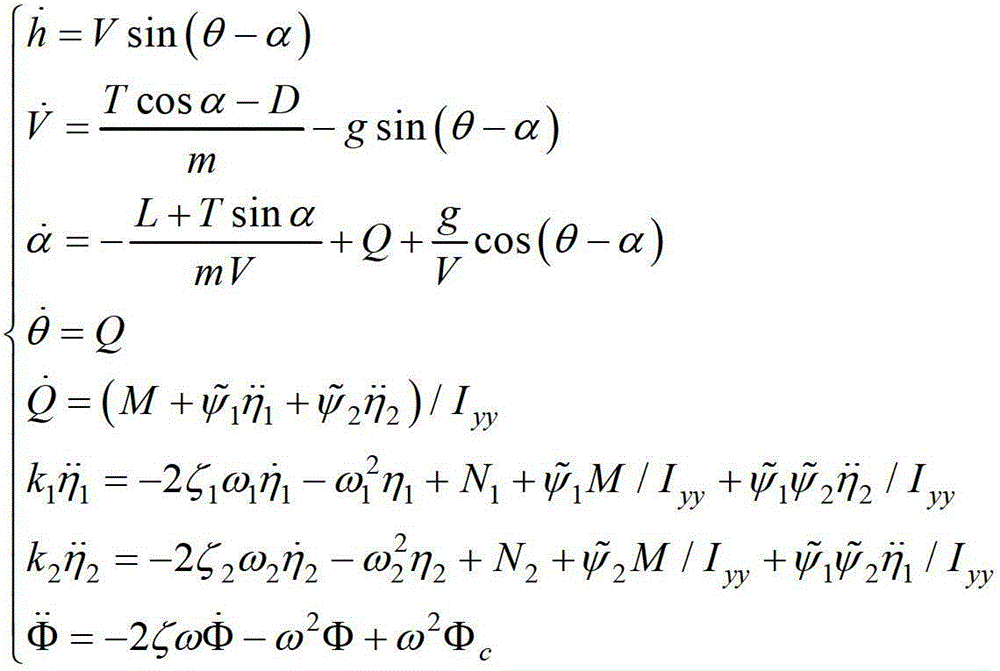
[0058] The first step is to establish the longitudinal model of the flexible hypersonic vehicle:
[0059] h · = V sin ( θ - α ) V · = T cos α - D m - g sin ( θ - α ) α · = - L + T sin α mV +...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More