

Dynamic hip joint prosthesis
A hip joint prosthesis, dynamic technology, applied in the direction of pivot connection, supporting machines, mechanical equipment, etc., can solve the problems that cannot be used for simulating joints, and achieve the effect of compact and reliable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
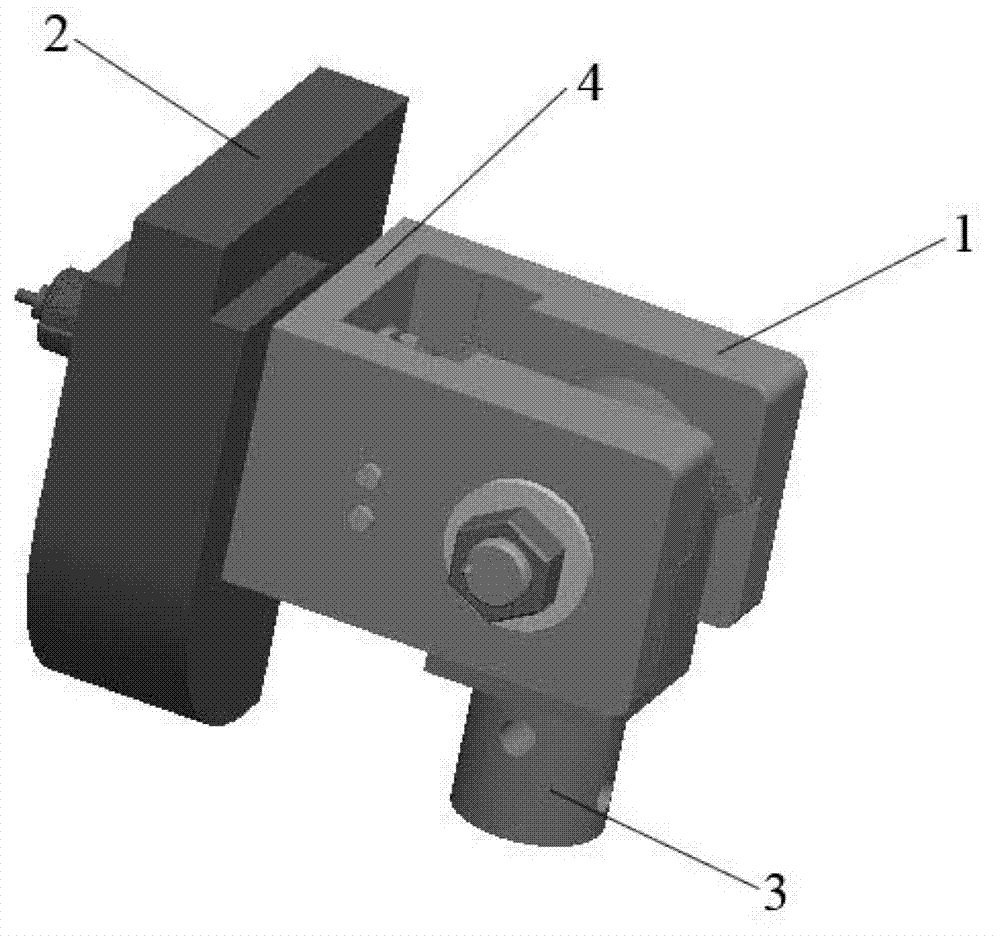
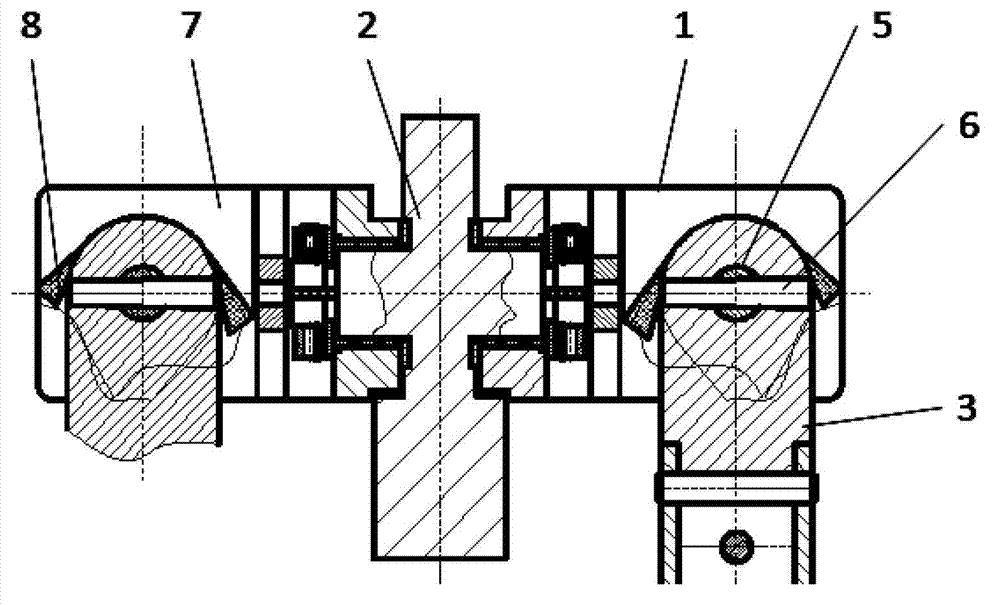
[0021] The simulated hip joint prosthesis of the present invention takes the right hip joint as an example, and the overall structure of the hip joint is as attached figure 1 shown. The main structure of the hip joint is a U-shaped member 1, the torso 2 is used to simulate the human pelvis, and the part 3 is used to simulate the human thigh (or femur). For specific connections, see the attached figure 2 , wherein the hole on the bottom surface of the U-shaped member 1 and the horizontal axis of the frontal surface protruding from the trunk 2 form a revolving pair to realize the front and rear swing of the thigh 3 (referred to as: hip swing joint); the two side plates of the U-shaped member 1 are coaxial The two holes of the thigh form another rotation pair through a shaft fixed to the thigh 3 to realize the left and right side swin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More