

Modular self-reconfigurable robot and method for controlling deformation thereof
A deformation control and self-reconfiguration technology, applied in the field of robots, can solve the problems of high power consumption of SMA shape memory alloy, difficulty in calculation, analysis and control of robot structure, high difficulty and cost, and achieve the effect of simple and reliable control method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
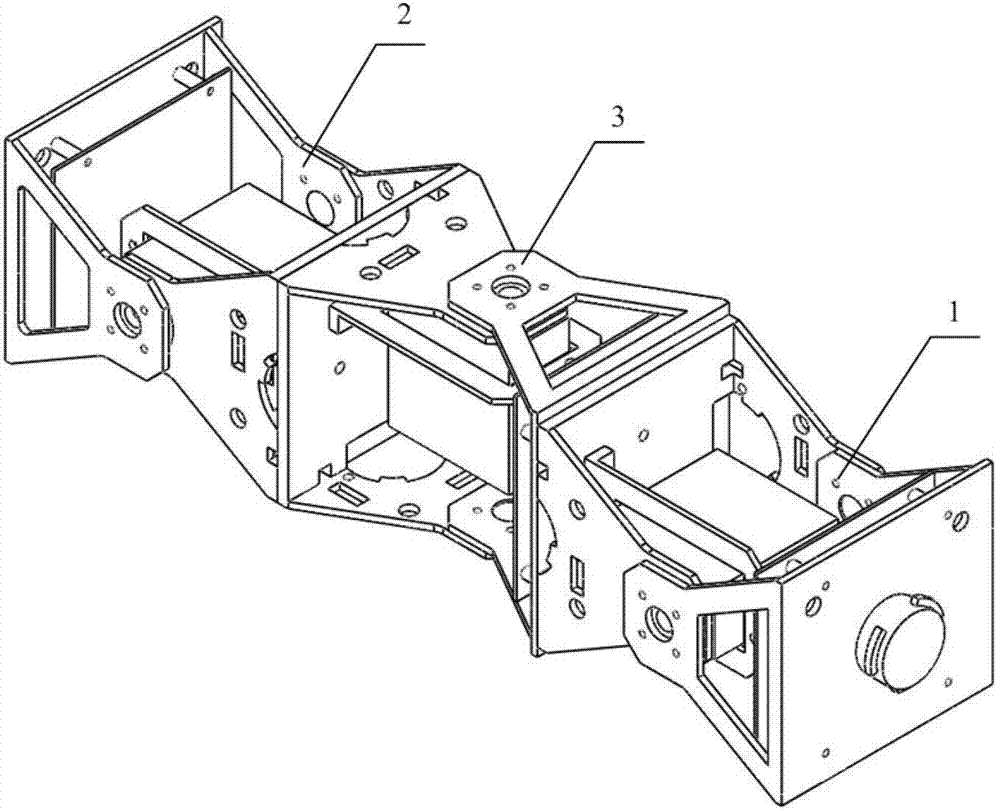
[0029] The present invention is a modular self-reconfigurable robot, which is composed of at least four monomers connected to realize "one" configuration and "ten" configuration, such as figure 1 As shown, the monomer of the present invention is composed of front joint 1, rear joint 2, and middle joint 3. The joints include two U-shaped frames and steering gears. Composed of two connecting arms, the connecting arms are symmetrically arranged on both sides of the bottom surface; the connecting arms of the two U-shaped frames are provided with hinge holes, and the two U-shaped frames are hinged together through the hinge holes, and are connected by rotation, and the steering gear is fixed on one of them. In the U-shaped frame, drive another U-shaped frame to rotate;
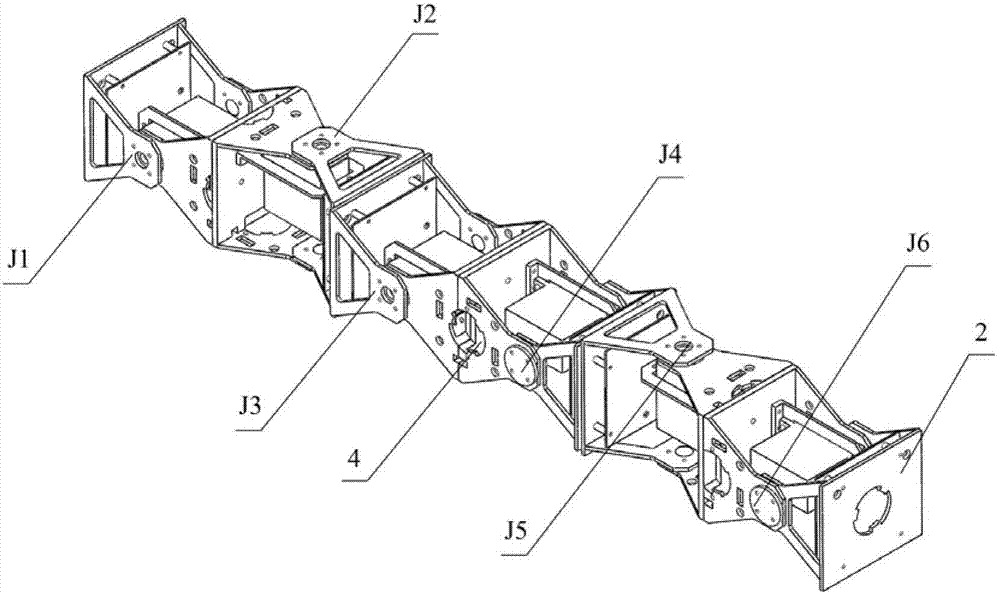
[0030] The connection configuration of the monomers, in the "one" configurati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More