

Detecting and positioning method and system for aiming at underwater obstacles
A positioning method and positioning system technology, applied in the detection and positioning of underwater obstacles and the system field, can solve the problems of poor accuracy and poor adaptability, achieve accurate detection and positioning, and improve the effect of obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
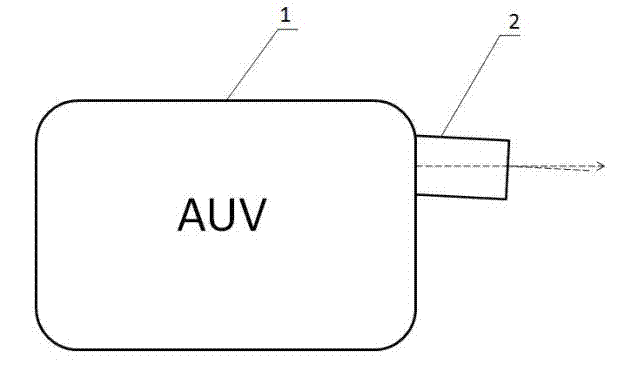
[0023] see figure 1 It is a schematic diagram of multi-beam sonar installation of the present invention, wherein 1 is an AUV, and 2 is a multi-beam image sonar. When the multi-beam image sonar 2 is installed, its sonar head direction should be at an angle of 0 to 3 degrees with the horizontal plane, The purpose of this is to minimize the impact of water surface reflection on image quality while ensuring the detection field of view.
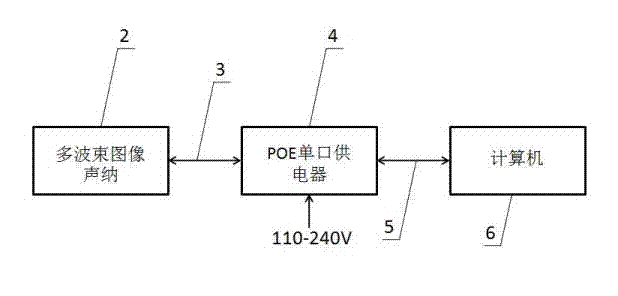
[0024] see figure 2 It is a schematic diagram of the connection between the multi-beam image sonar and the computer of the present invention, wherein 2 is the multi-beam image sonar, and 4 is the POE single-port power supply, which are connected by the sonar cable 3, and the computer 6 is connected to the POE single-port power supply through the network cable 5 4 connection, POE single port power supply 4 powered by 110-240V p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More