

Method for service robot to recognize and locate target
A service robot and target recognition technology, applied in the field of target recognition and positioning of service robots, to achieve the effect of reducing complex lighting conditions and improving effectiveness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
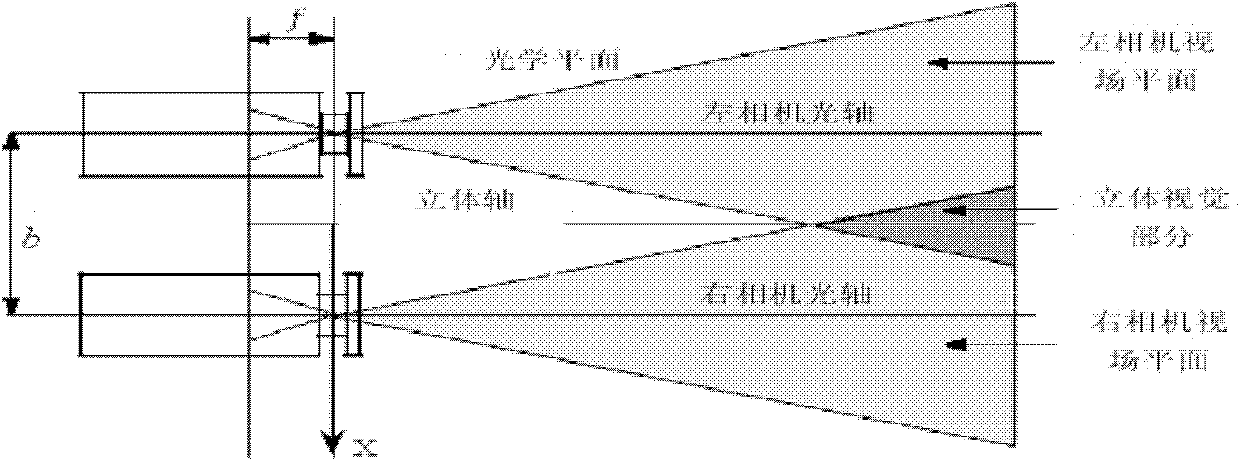
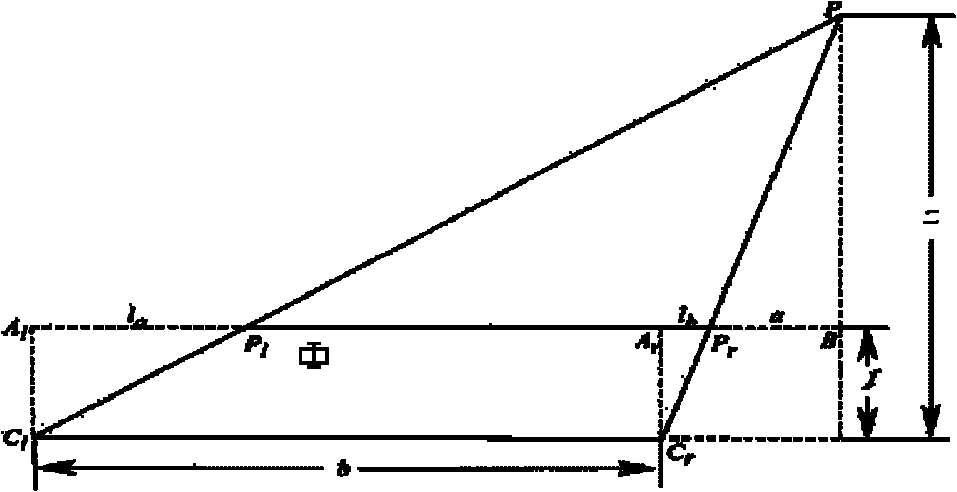
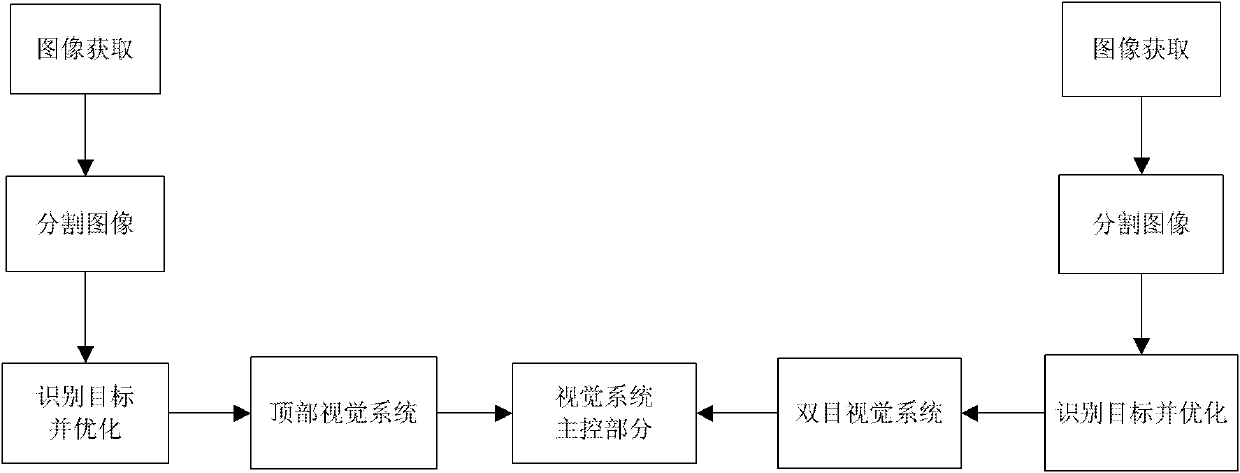
[0022] Such as Figure 1~3 As shown, the present invention obtains the real-time image segmentation threshold by improving the Otsu threshold method and applying the K-L transformation method, thereby reducing the influence of factors such as complex and uneven lighting conditions.
[0023] The Otsu method, also known as the Otsu method or the maximum between-class and intra-variance ratio method, is an automatic threshold determination method. It is derived on the basis of the gray histogram with the principle of the least square method, and has the best segmentation threshold in the statistical sense.
[0024] K-L Transform (Karhunen-Loeve Transform) is a transformation based on statistical properties. method of correlation coefficient. The outstanding advantage of the K-L transformation is that it has good correlation and is the best transformation in the sense of mean square error (MSE, Mean Square Error).
[0025] The service robot system uses the principle of animal v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More