

Spraying path automatic generating method for adaptive modeling of multiple spray guns
An automatic generation and self-adaptive technology, applied in spraying devices, special data processing applications, instruments, etc., to achieve the effect of maximizing, overcoming the improvement of spraying efficiency, and efficient spraying
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
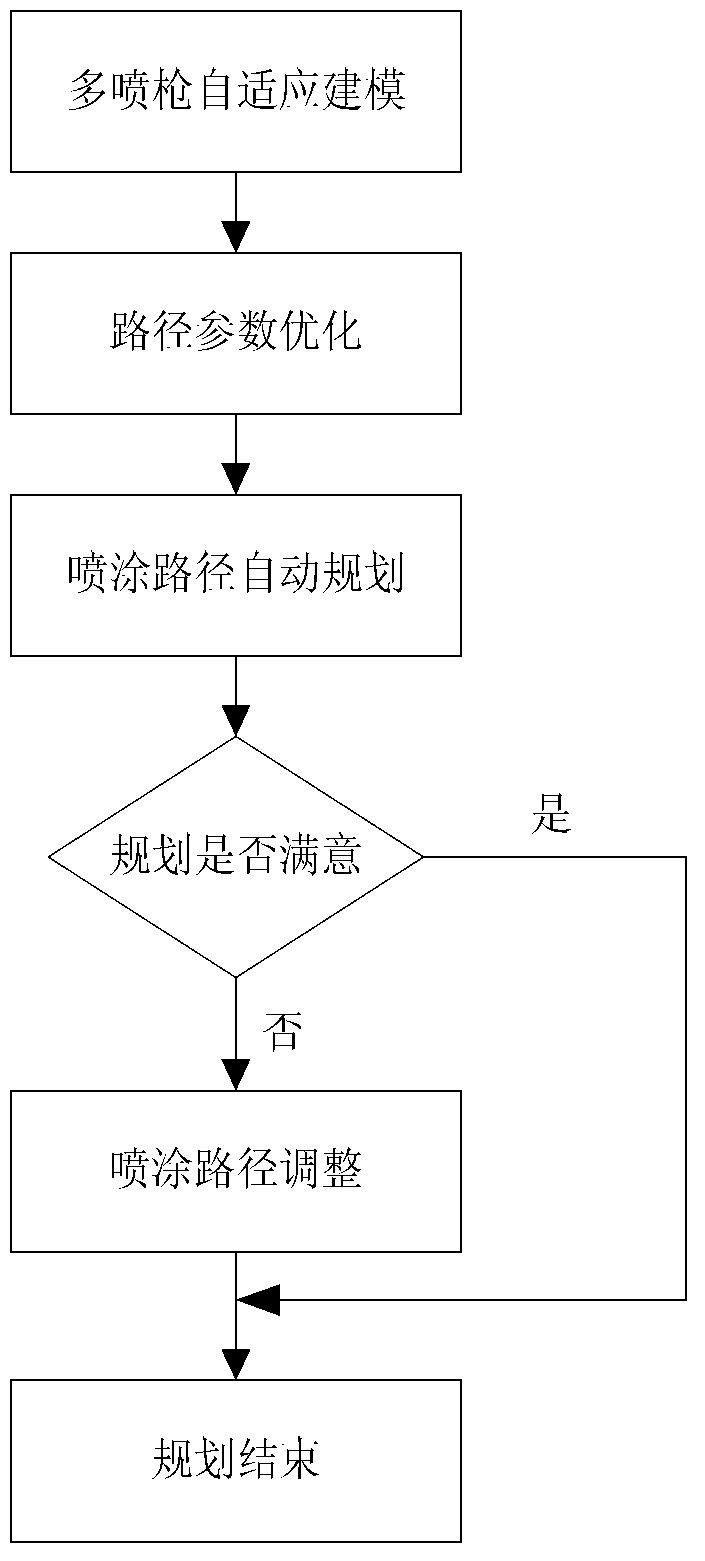
[0020] figure 1 It is a schematic diagram of the automatic planning process of multi-spray gun self-adaptive spraying path for the spraying robot proposed by the present invention. Such as figure 1 As shown, according to the present invention, the automatic generation method of the spray path comprises the following steps:
[0021] 1. Accurate modeling of spraying process
[0022] In the off-line path planning method, the key issue is how to establish an accurate mathematical model of the cumulative thickness of the coating, which plays a decisive role in the quality of the entire spraying production. In this step, a corresponding static spraying experiment is designed for different spraying parameters that may affect the spraying process, and a film thickness meter is used to measure the coating thickness distribution formed by the spray gu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More