Indoor scene identifying method based on point cloud fragment division
A recognition method and indoor scene technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve problems such as the lack of a model system, and achieve the effect of easy recognition and operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0025] A method for indoor scene recognition based on point cloud segment segmentation, the method comprising the following steps:
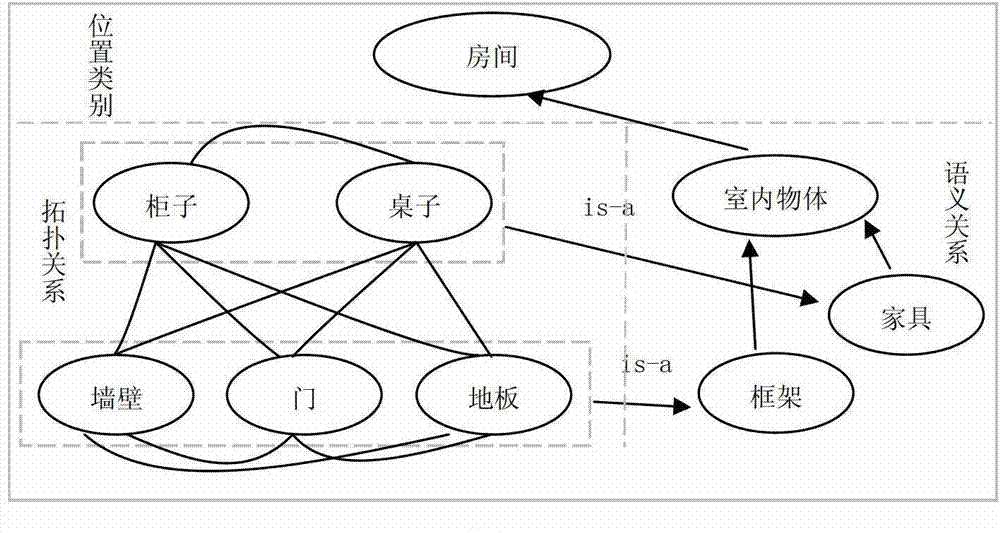
[0026] Step 1. Combining with the graph theory method, the scene pre-segmentation is performed on the 3D point cloud image according to the plane normal vector and color information of the 3D point cloud, and the image is divided into different point cloud segments, and each segment is guaranteed to belong to a different object. The indoor scene space contains many objects, such as walls, doors, floors, ceilings, tables, chairs, etc. In order to obtain semantic information in the scene and better understand the environment, scene segmentation is an essential prerequisite.
[0027] The scene pre-segmentation specifically includes the following steps:
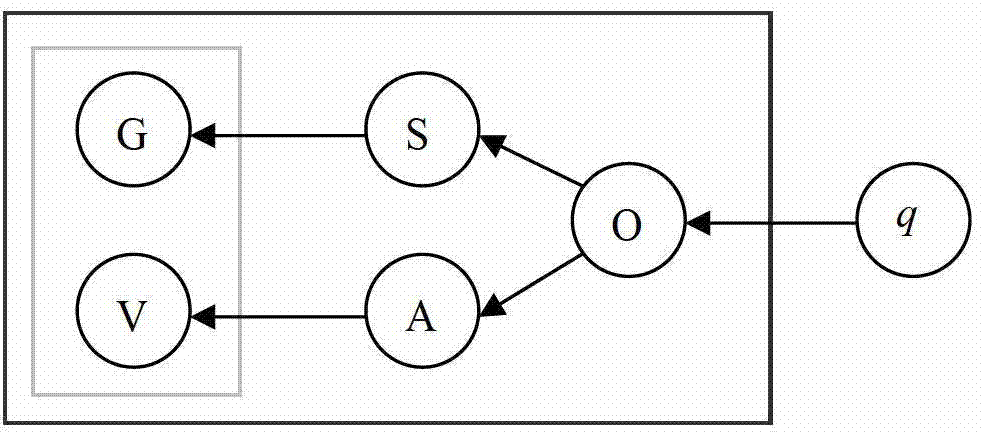
[0028] 1) Construct an undirected graph G(V, E), where V represents a vertex in the graph, each vertex represents a data point in the scene space, and each point v i =(x i ,y i ,z i , r i , g ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com