

Low-altitude unmanned aerial vehicle vision positioning method based on rapid robust feature
A robust feature and visual positioning technology, applied in image data processing, instruments, calculations, etc., can solve the problems of large registration errors and increase the complexity of the method, and achieve the effect of accurate estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
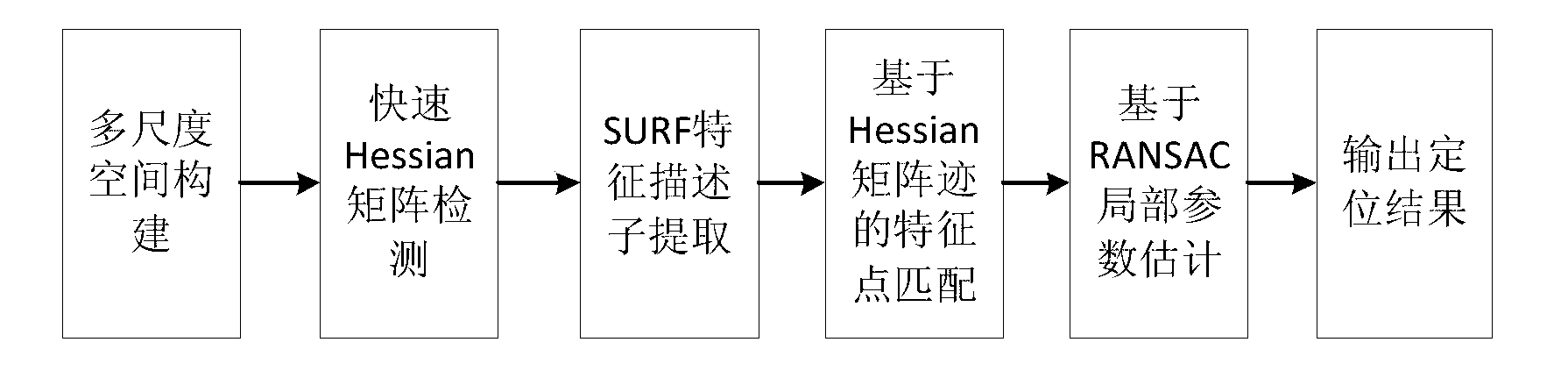
[0021] 1. A low-altitude UAV visual positioning method based on fast and robust features, comprising the following steps:
[0022] A. SURF feature point extraction of low-altitude UAV aerial sequence images.
[0023] B. SURF feature point matching of low-altitude UAV aerial sequence images.
[0024] 2. The rapid and robust feature extraction of low-altitude UAV aerial sequence images patented by the present invention, which includes the following aspects:
[0025] A. Multi-scale space construction. When preprocessing the image, the Gaussian kernel is approximated by the box filter, and the calculation speed of the algorithm is greatly improved by using the property that the calculation amount of the box filter is independent of the filter size when calculating the convolution. A multi-scale space is established by computing box filters at different scales.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More