

Rope-driving multi-joint robot
A multi-joint robot, rope-driven technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., to achieve the effects of cost reduction, high transmission accuracy, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
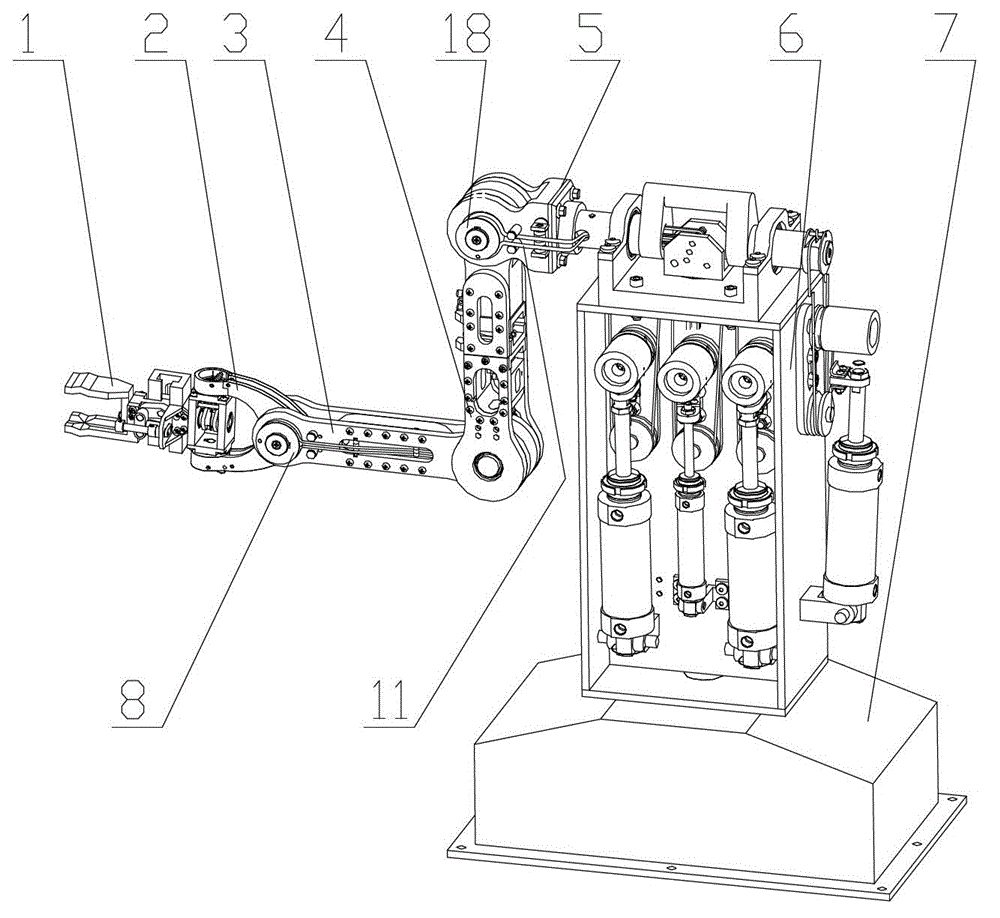
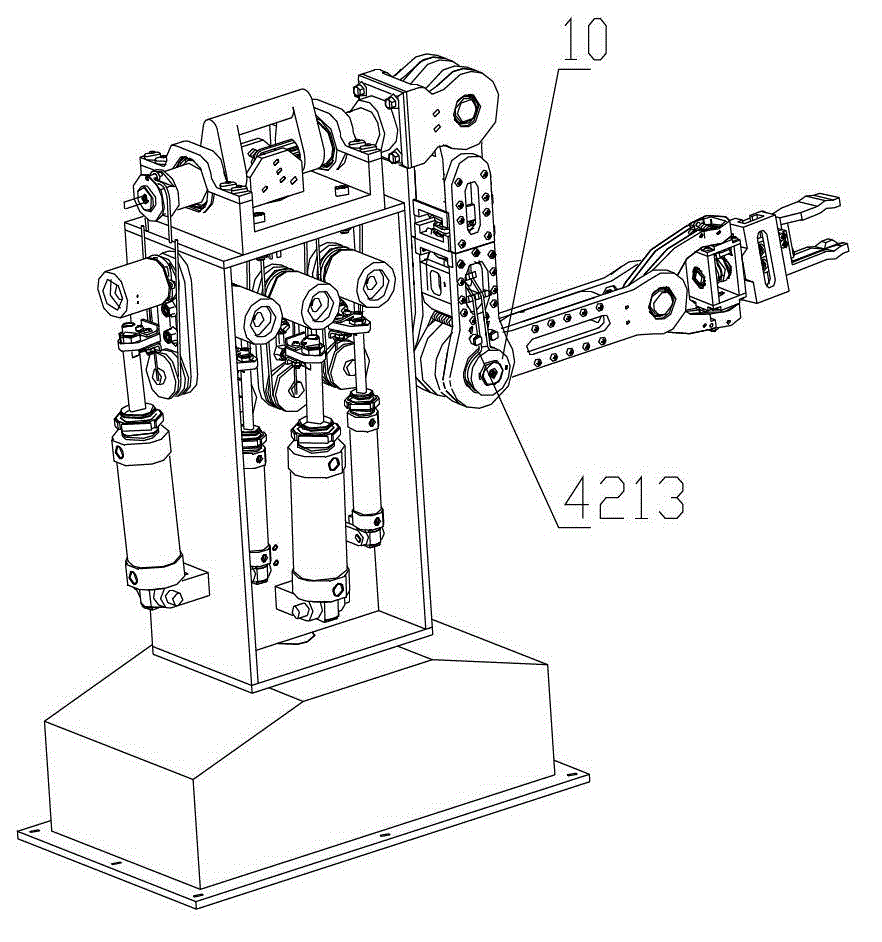
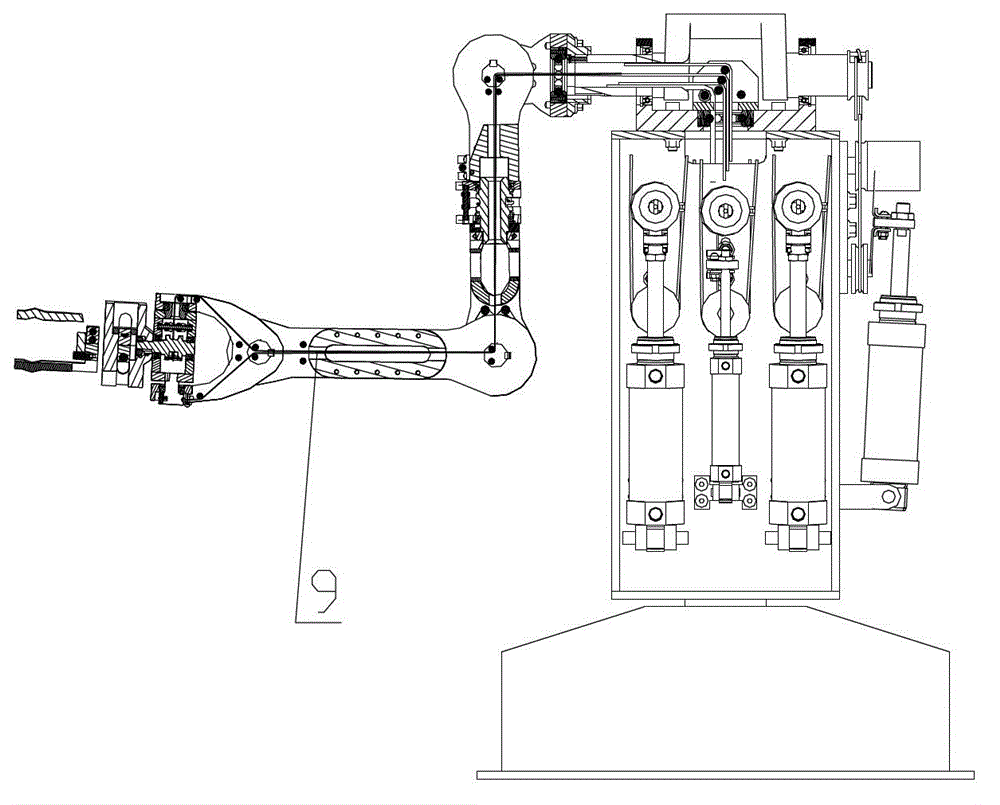
[0066] Such as Figure 1-2 As shown in 3, the rope-driven multi-joint robot of the present invention is divided into a hand 1, a wrist 2, a forearm 3, an upper arm 4, a shoulder 5, a waist 6 and a base 7. The waist 6 is arranged on the base 7, and the waist 6 passes through The crankshaft assembly 52 is connected to the shoulder 5, the shoulder 5 is connected to the upper arm 4 through the rotary joint shaft of the upper arm 4, and the upper arm is driven by the driven wheel assembly III18; the upper arm 4 is connected to the small arm 3 through the rotary joint shaft of the small arm 3, and the The driven wheel assembly II10 drives the forearm; the small arm 3 is connected to the wrist 2 through the rotating joint shaft of the wrist 2, and drives the wrist through the driven wheel assembly I8; the wrist 2 is connected to the hand 1 through the rotating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More