Five-degree-of-freedom parallel manipulator capable of realizing high-velocity motion
A technology with high-speed motion and degrees of freedom, applied in the field of robotics, can solve problems such as difficult to achieve high-speed motion, affect the dynamic performance of the mechanism, increase the mass and inertia of the moving parts of the mechanism, and achieve complex pick-and-place operations, light weight, and strong force uniform effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in combination with specific embodiments.
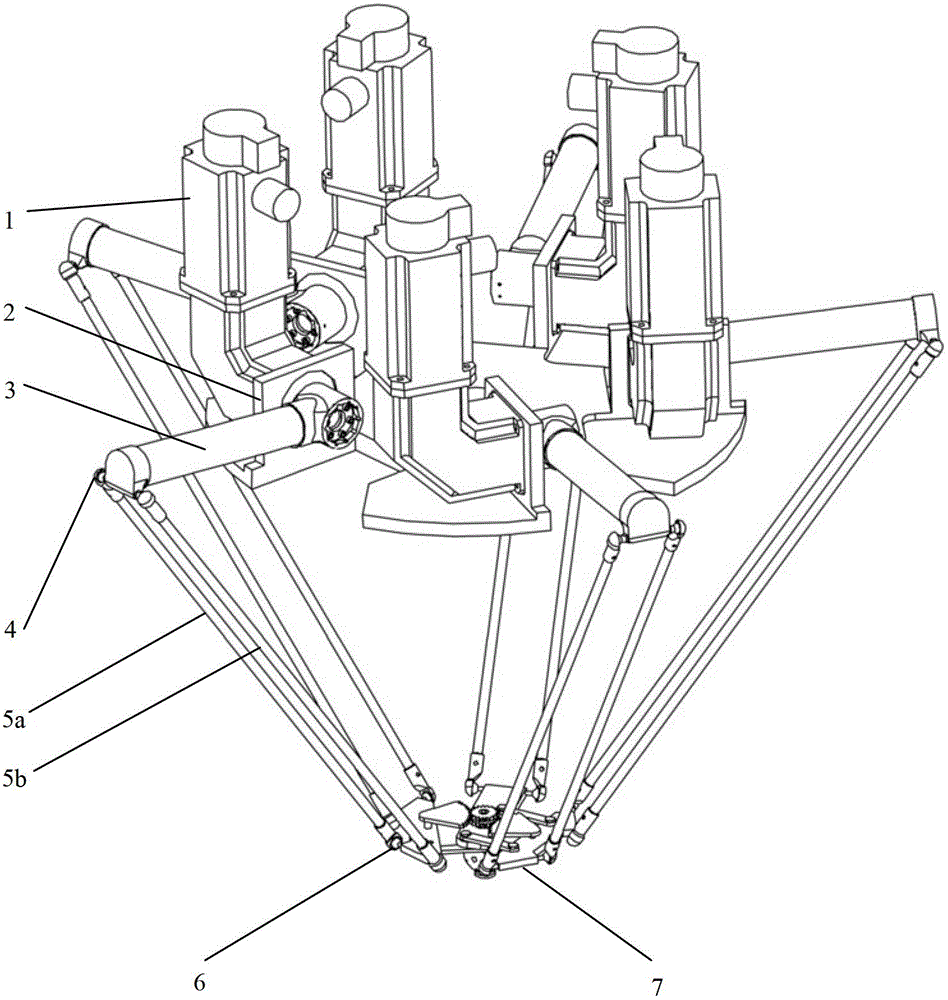
[0020] Such as figure 1 As shown, the present invention is a five-degree-of-freedom parallel manipulator that can realize high-speed motion, including a fixed frame 2, a moving platform 7, and five branch chains with the same structure that are symmetrically arranged between the fixed frame 2 and the moving platform 7. Five driving devices 1 are fixedly connected to the fixed frame 2 .
[0021] Each branch chain is made of near frame bar 3, upper connecting shaft 4, two mutually parallel and equal long far frame bars and lower connecting shaft 6; The output end of a driving device 1 on the fixed frame 2 is affixed, and the other end of the near frame bar 3 is affixed with the upper connecting shaft 4 in the branch chain; The upper connecting shaft 4 in the branch chain is ball-hinged, and the other ends of the two far-end rods are respectively connected to the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com