

Output control method and device of gesture sensing equipment, and display control method and system
A posture perception and output control technology, applied in the input/output process of data processing, instruments, electrical digital data processing, etc., can solve the problems of user's hand shaking, motion positioning deviation, slow and fast movement of handheld devices, etc. Achieve the effect of optimizing the trajectory and realizing the following performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
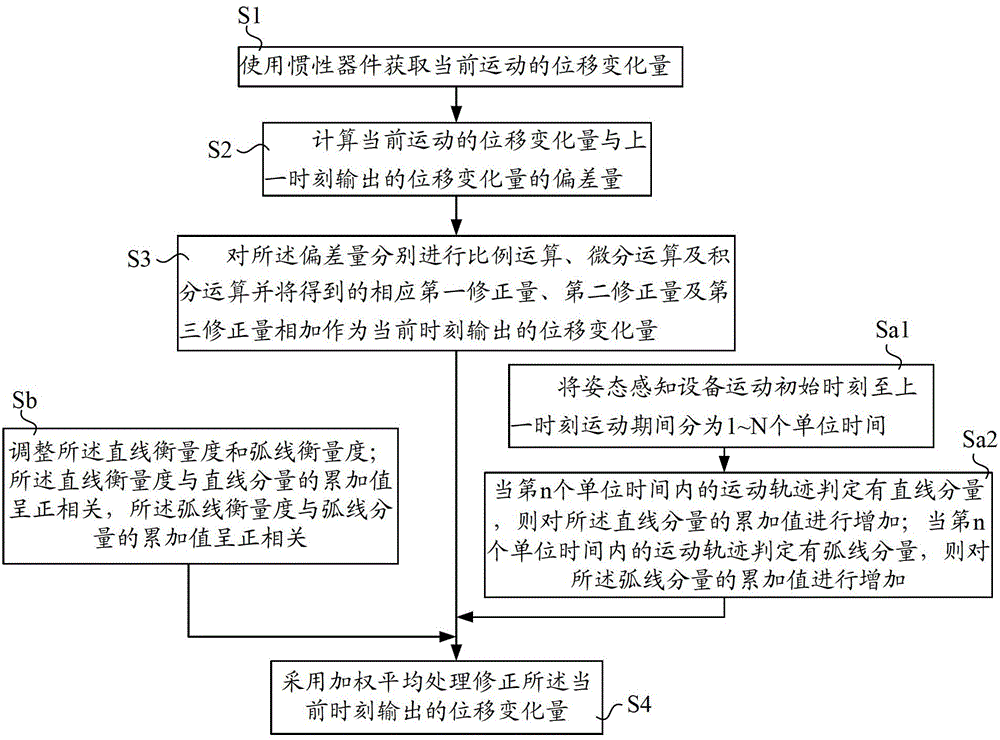
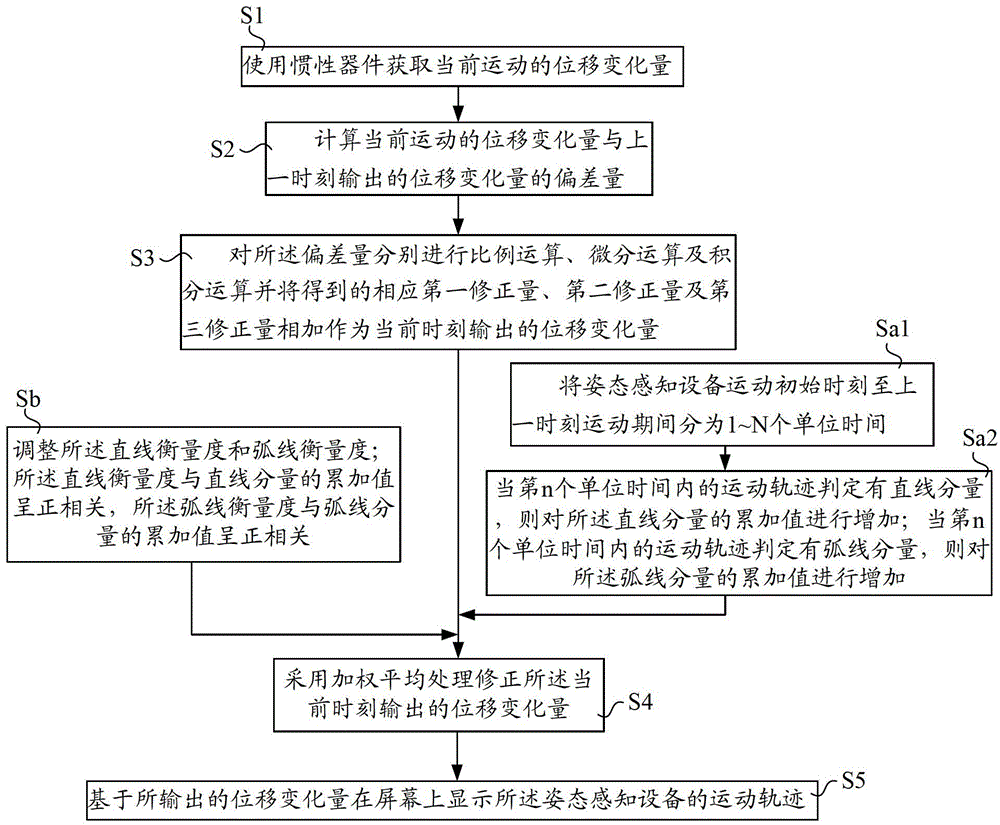
[0063] PID algorithm is a classic algorithm in the field of automatic control. When controlling a specific process, it can achieve good following performance and eliminate system deviation. However, it is not easy to apply the PID algorithm to a system because the target value of the PID algorithm model is difficult to determine. The meaning of the above target value is generally the output of the system, and the output is generally the result of the PID algorithm model, and the result is of course unknown before it is applied. Therefore, it is difficult to obtain the deviation of the system for the unknown target value, making the PID algorithm model Difficulty in application.
[0064] The inventor also experienced the above difficulties during the process of proposing the technical solution of the present invention. First of all, there is a deviation between the output displacement variation of existing attitude sensing devices and the actual motion positioning. To use the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More