

Multi-joint single-incision oro-peritoneal minimally invasive surgery robot and its operating mechanism
A minimally invasive surgery, operating mechanism technology, applied in surgical robots, surgery, medical science and other directions, can solve the problems of patients with many skin incisions, large surgical robots and other problems, achieve the requirements of single-incision minimally invasive surgery, ensure flexibility and Reliability, effect of size control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
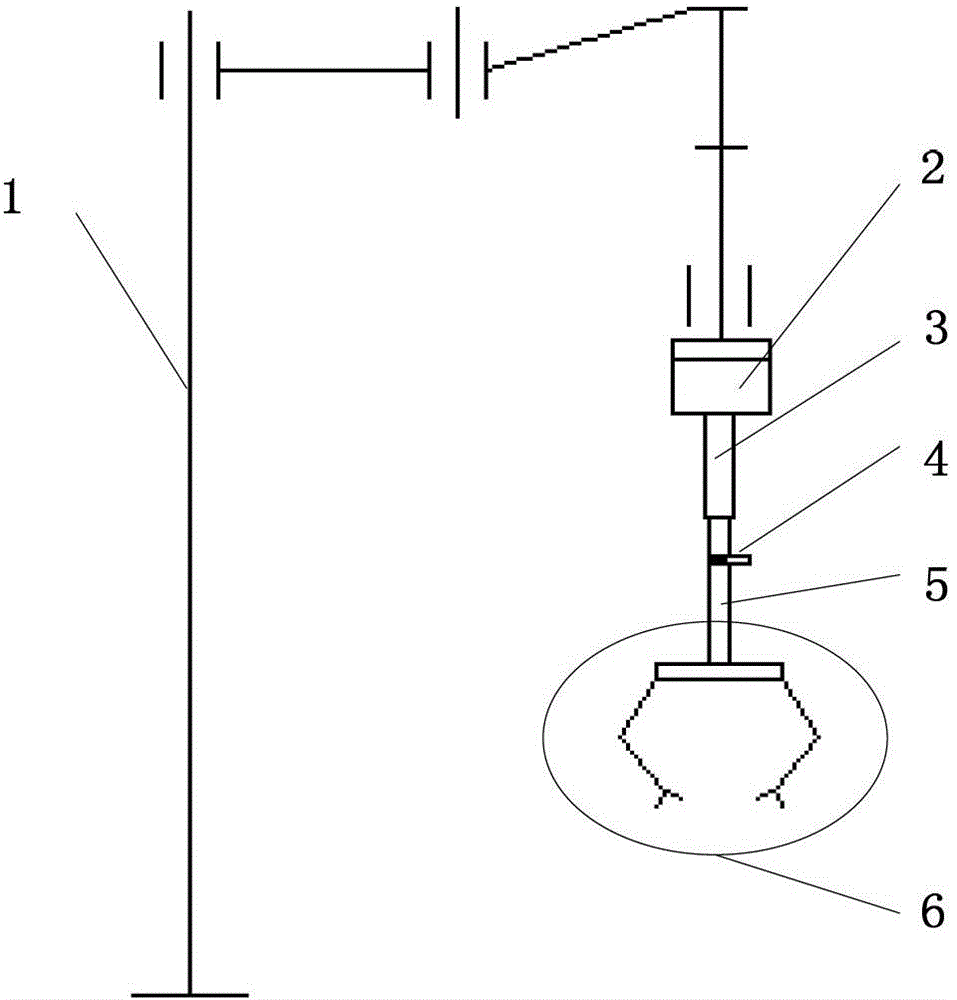
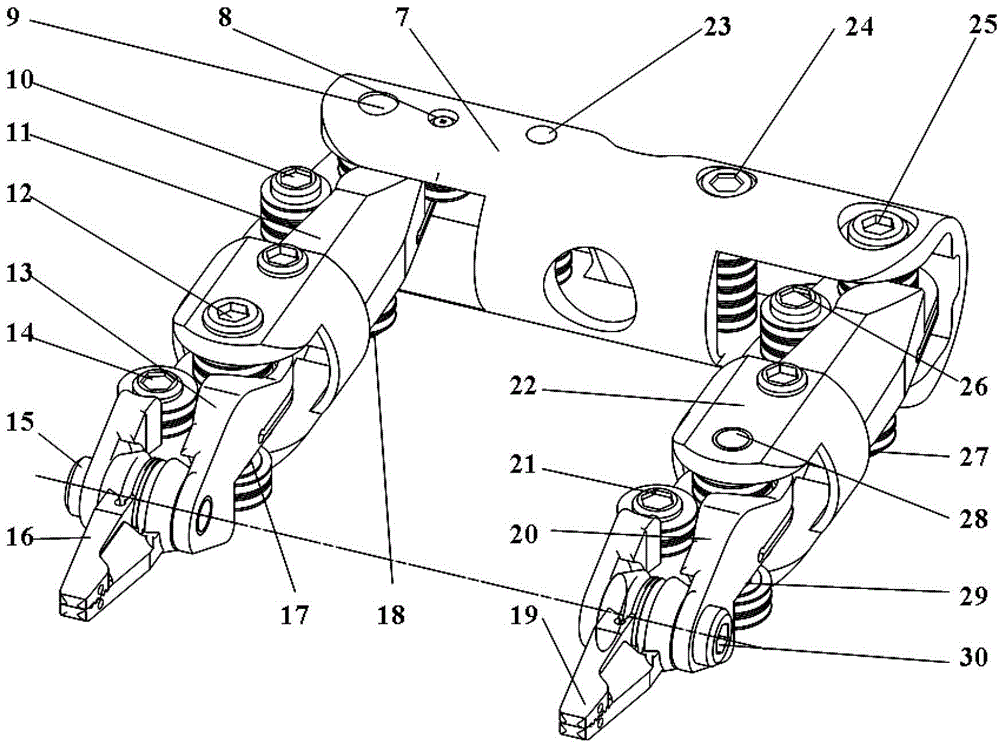
[0042] Such as figure 1 As shown, it can be seen that the robot operating mechanism for multi-joint single-injury oral and abdominal minimally invasive surgery is composed of a mechanical arm and a power part. In this embodiment, the power part is realized by a motor box 2. Two connecting arms 11, 22 and two tip manipulators 13, 20 with the same structure, the end of the tip manipulator is equipped with a knife head, which can rotate flexibly; the structure of the knife head is similar to scissors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More