Foreground segmentation method based on significance detection
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A foreground segmentation and salient technology, applied in the field of computer vision, to achieve the effect of convenient follow-up processing and analysis, suppression of interference, and good real-time performance
Active Publication Date: 2013-04-03
CHERY AUTOMOBILE CO LTD
View PDF2 Cites 29 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0006] The purpose of the present invention is to provide a foreground segmentation method based on saliency detection, which solves the problem of extracting the region of interest in target detection, adopts a multi-scale and multi-feature saliency detection algorithm for images collected by cameras, and generates full-scale images with clear outlines. The saliency map, and then use the k-means clustering algorithm for foreground segmentation
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0044] (1) Perform a 3×3 median filter on the original image to remove the influence of some impulse noise on saliency detection.
[0045] (2) Extract the color, brightness, and direction features of the original image, assuming that the original image is in RGB format, the extraction method is as follows,
[0046] a. Let r, g, and b be the three components of image red, green and blue respectively, then the brightness feature can be obtained by the following formula: I(r+g+b) / 3;
[0047] b. Convert the RGB color space to CIELAB space, and extract three color components of l, a, and b as color features;
[0048] c. Use Gabor filters in 4 directions of 0°, 45°, 90°, and 135° to filter the brightness map I respectively to obtain four direction features.
[0049] In this way, 8 feature maps are formed, and the feature map set {F i}, 1≤i≤8 represent them.
[0050] (3) The feature atlas is down-sampled at intervals of 2 scales, the scales are 1 / 2 and 1 / 4 of the original image, and...
Embodiment 2
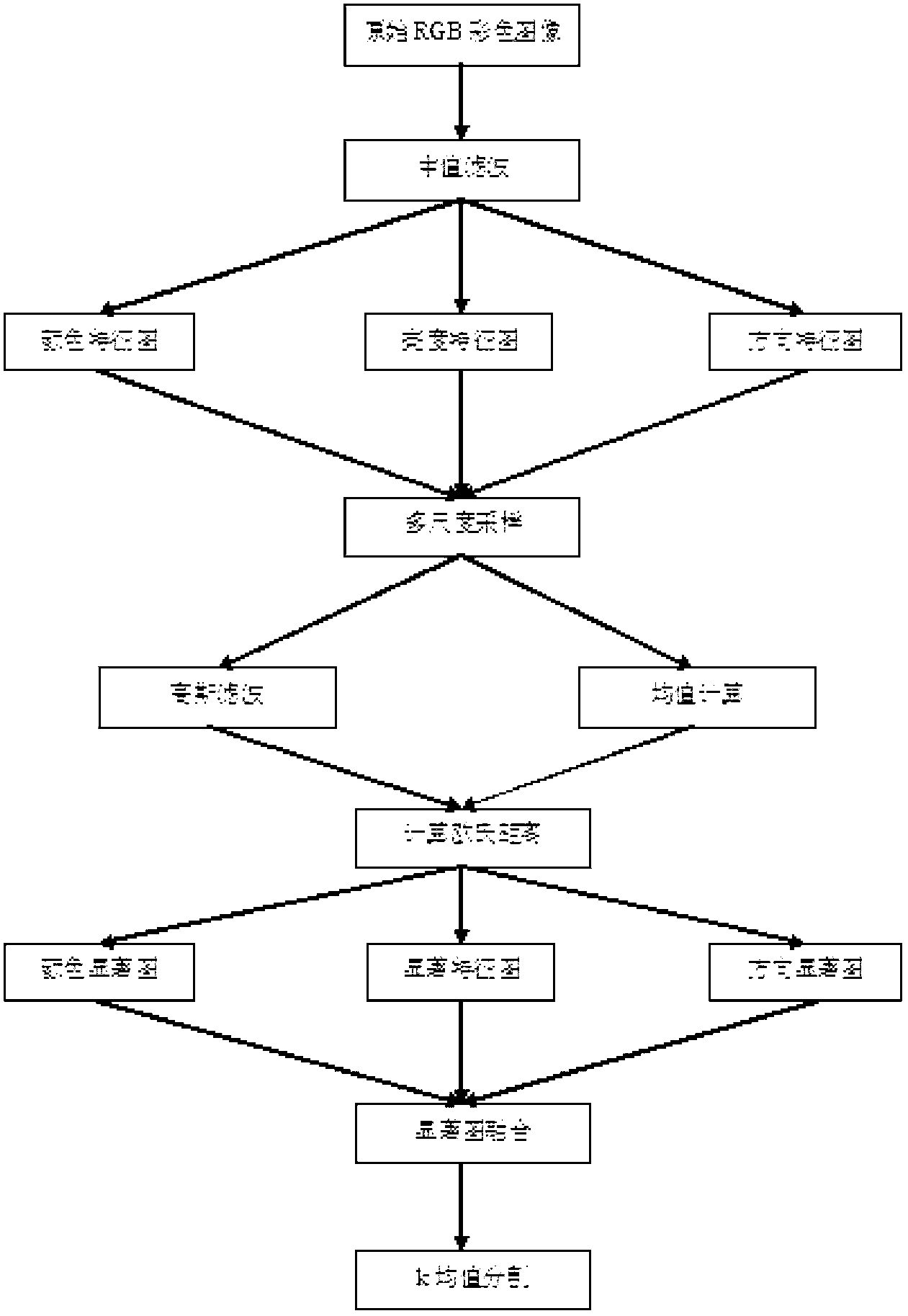
[0059] figure 1 The flow chart of the foreground segmentation method based on saliency detection according to the present invention is provided, and its main steps are as follows:
[0060] (1) Input a color image I(x,y) in RGB format, perform 3×3 median filtering on I(x,y), and the filtered image I'(x,y) is
[0061] I'(x,y)=median(I(i+1,y+j)),1≤i≤1,-1≤j≤1
[0062] (2) Extract color, brightness, and direction features according to the following rules
[0063] a. Let r, g, and b be the three components of image red, green and blue respectively, then the brightness feature can be obtained by the following formula: I=(r+g+b) / 3;
[0064] b. Convert the RGB color space to CIELAB space, and extract three color components of l, a, and b as color features;
[0065] c. Use Gabor filters in 4 directions of 0°, 45°, 90°, and 135° to filter the brightness map I respectively to obtain four direction features.
[0066] In this way, 8 feature maps are formed, and the feature map set {F i...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a foreground segmentation method based on significance detection, which comprises the following steps of: (1) inputting a color image in an RGB (Red, Green, Blue) format; (2) subjecting the color image in the RGB format to median filtering; (2) extracting color characteristics, brightness characteristics and direction characteristics to obtain color characteristic patterns, brightness characteristic patterns, and direction characteristic patterns, which form a characteristic pattern set containing eight characteristic patterns; (4) subjecting 8 patterns in the characteristic pattern set to multi-scale sampling; (5) subjecting each characteristic pattern to Gaussian filtering, and calculating the mean value of each characteristic pattern; (6) calculating Euclidean distance between the Gaussian blurred image and the mean value of each characteristic pattern; (7) obtaining color salient patterns, brightness salient patterns and direction salient patterns; (8) blending the above salient patterns to obtain a comprehensive salient pattern; and (9 ) subjecting the comprehensive salient pattern to the foreground segmentation by means of K-means clustering. The foreground segmentation method can effectively inhibit the interference of noise and background on a target and has pretty good real time performance.
Description
technical field [0001] The invention relates to the field of computer vision, in particular to a foreground segmentation method based on multi-scale and multi-feature saliency detection. Background technique [0002] With the continuous development of digital products and the Internet, more and more digital images need to be transmitted, processed and utilized. Since the foreground segmentation of important areas in the image is more conducive to the effective processing of data, how to quickly and accurately find potential information related to the target has become a research hotspot in the field of computer vision, which involves image saliency Problems with region detection. [0003] Human vision has the ability to quickly search for objects of interest, and this ability of visual attention is called visual saliency. Visual saliency is a perceptual property that makes an object, person, or pixel stand out relative to its surroundings, thereby gaining people's attentio...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More