

Method and device for controlling to support foot of humanoid robot in single leg supporting period
A humanoid robot, the technology of the support period, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the purpose and technical solution of the present invention clearer, the implementation of the present invention will be further described in detail below taking the fast walking of a humanoid robot as an example.
[0074] A method for a humanoid robot to control the rotation of a support foot plate during a single-leg support period to increase the stride, comprising the following steps:
[0075] Calculate the virtual zero moment point and detect the rotation angle of the supporting foot;
[0076] The rotation angle of the supporting foot is determined;
[0077] Determination of virtual zero moment point position;
[0078] Virtual zero moment point position limit
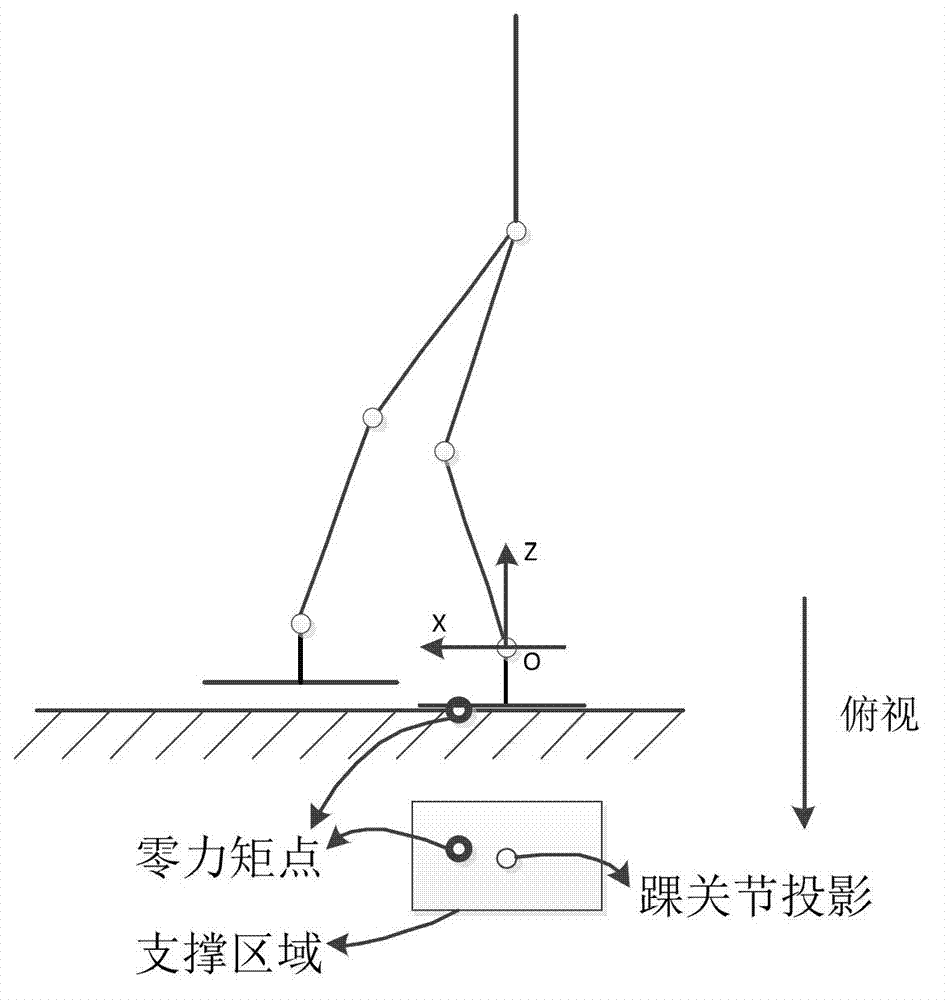
[0079] First establish the used coordinate system of the present invention ( figure 1 ). The origin of the coordinate system is located at the ankle of the supporting foot, the forward direction is +X, and the vertical upward direction is +Z (the +Y direction is determined by the right-h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More