

Random trihedron-based radar-camera system external parameter calibration method
A technology of external parameters and calibration methods, applied in image data processing, instruments, calculations, etc., can solve problems such as lack of environmental color information, time-consuming, and inability to meet real-time and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
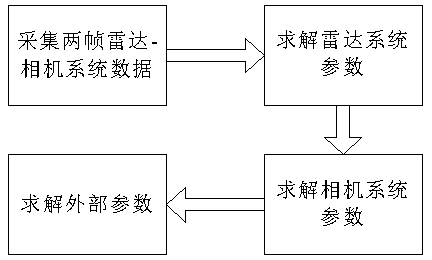
[0059] figure 1 The technical flow of the calibration method of the external parameters of the radar-camera system is given.
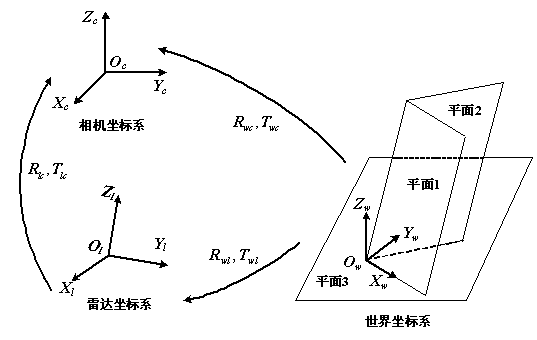
[0060] The calibration of the external parameters of the radar-camera system includes the following four parts: ① Collect two frames of radar-camera system data; ② Solve the parameters of the radar system: use the coordinates of the points on the trihedral surface under the radar system to solve the parameters of each plane in the two frames of radar data , relative motion parameters, and the conversion relationship with the world coordinate system; ③Solve the camera system parameters: based on the known camera parameters, use the parameters under the radar system to solve the parameters of each plane in the two frames of camera data, the relative motion parameters, and the world coordinates ④ Solve the external parame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More