

Wearable lower limb exoskeleton walking-assisted robot
A walking aid robot and exoskeleton technology, which is applied in the direction of appliances to help people move around, physical therapy, etc., can solve the problems of large structure volume, large mass, increase the burden on patients, and the structure is not compact, so as to reduce the complexity and enhance the comfort. and reliability, compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
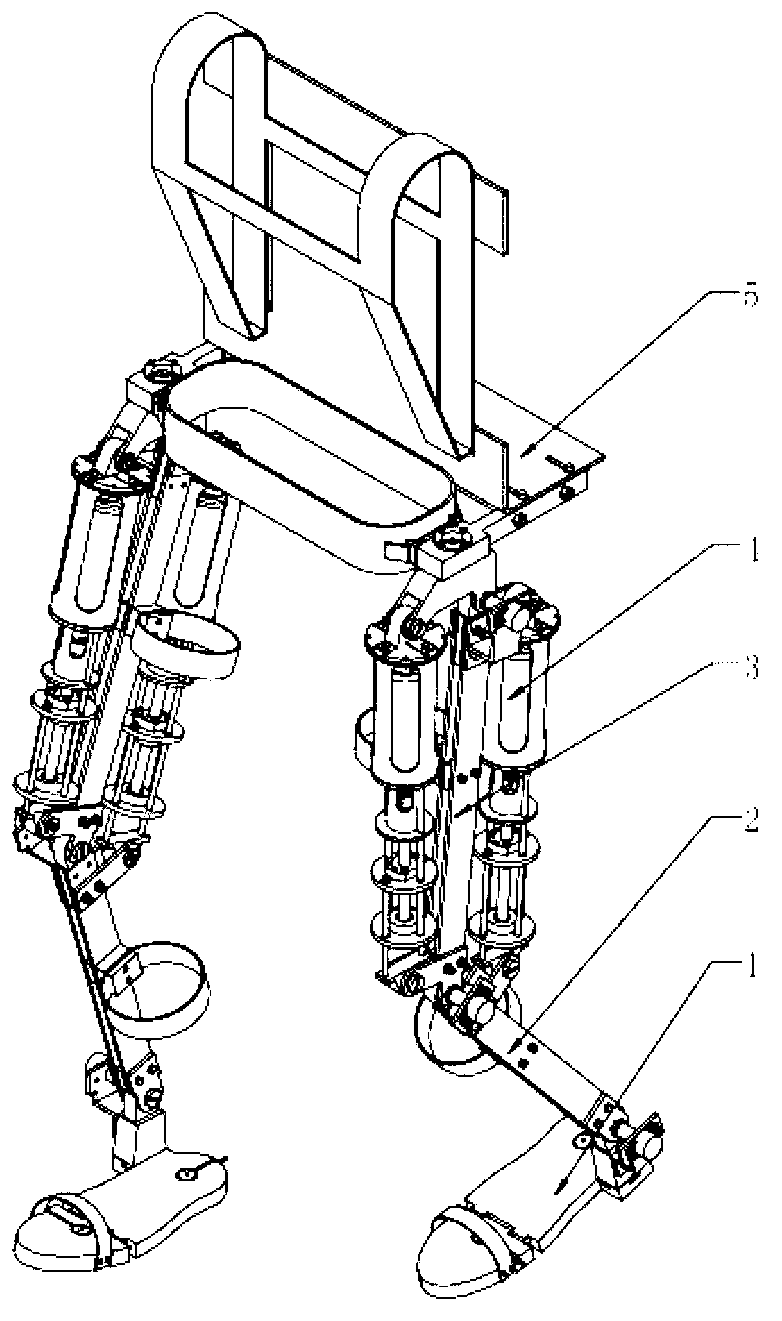
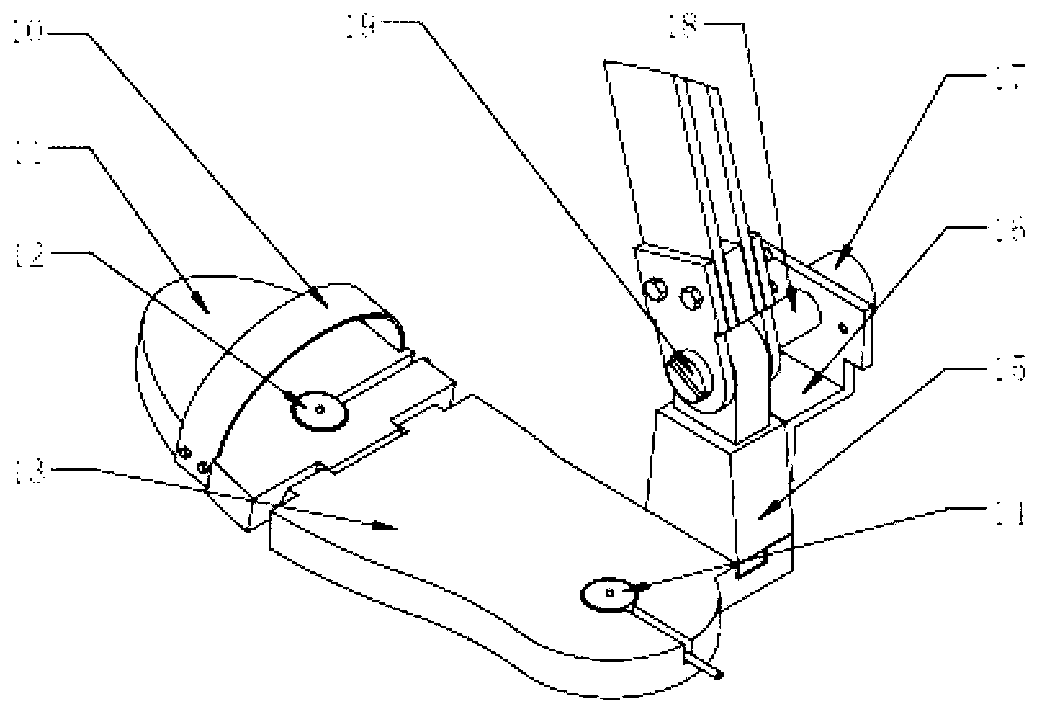
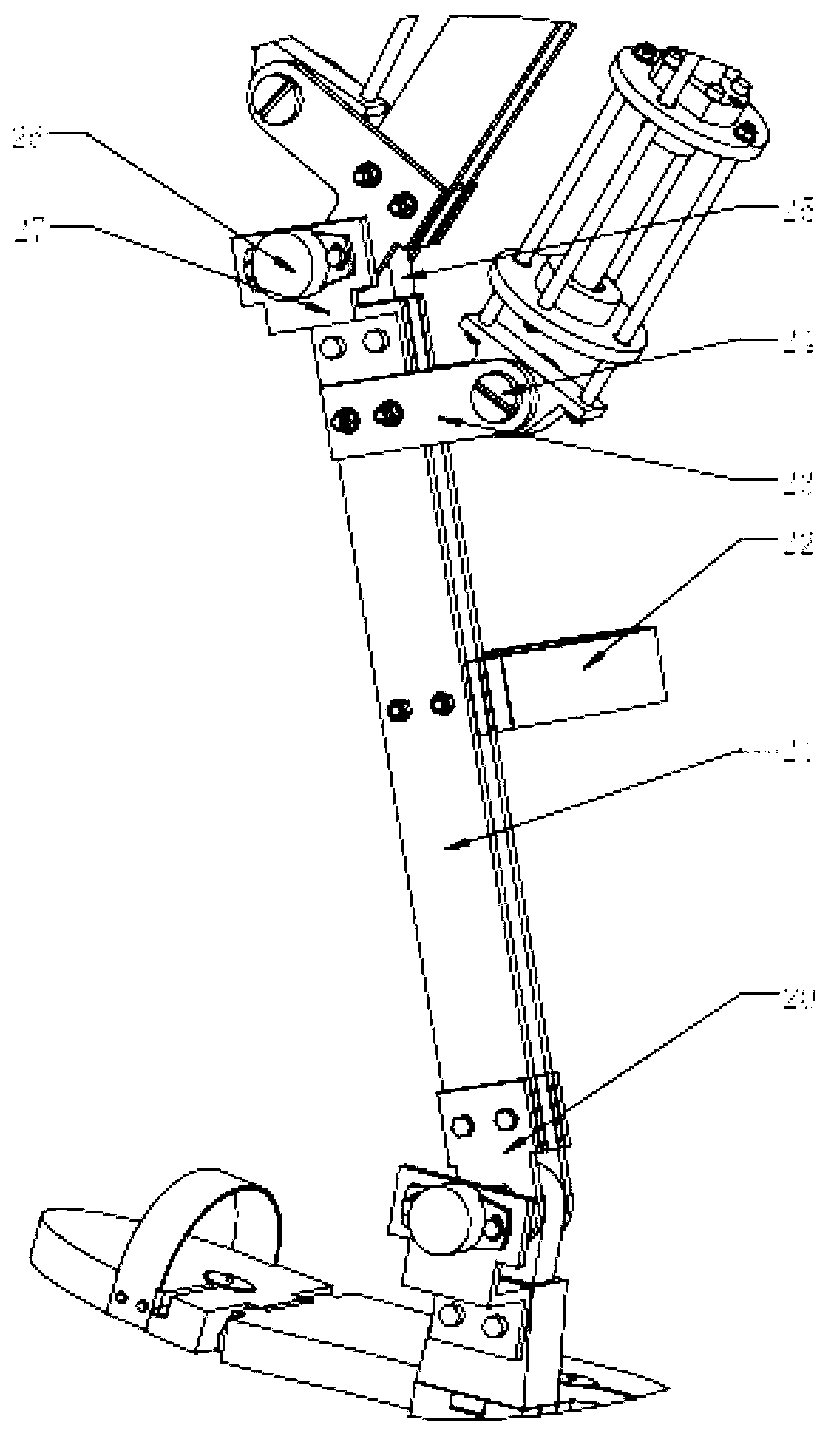
[0031] The invention discloses a wearable lower limb exoskeleton walking assistance robot. The wearable lower limb exoskeleton walking assistance robot has good consistency of hip joint motion and human body motion during walking, and has small human-machine knee joint coaxiality and position deviation. The ankle joint is compact.
[0032] The wearable lower limb exoskeleton walking robot has four degrees of freedom for a single lower limb, including hip joint flexion and extension motion, adduction and abduction motion, knee joint flexion and extension motion, and ankle joint plantar flexion and dorsiflexion motion. Among them, the flexion and extension motion of the hip joint and the knee joint flexion and extension motion are driven. The walking is realized by using less but necessary degrees of freedom, which reduces the complexity of the mechanism and improves the efficiency of the device. Straddle walking is achieved through the flexion and extension of the knee and hip jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More