

Binocular three-dimensional reconstruction method
A 3D reconstruction and dual-purpose technology, applied in 3D modeling, image data processing, instruments, etc., can solve the problems of high algorithm complexity, reduce the error matching rate, improve the matching accuracy rate, and reduce the scope of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
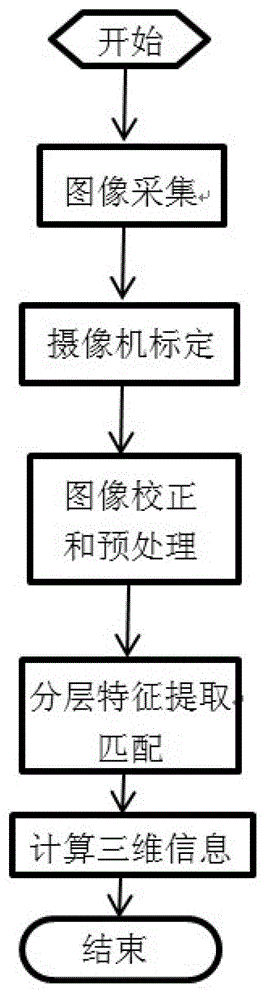
[0023] Such as figure 1 As shown, a method for binocular 3D reconstruction includes the following steps:
[0024] Step A: Image acquisition, such as figure 1 In the image acquisition part of, this method uses two CCD cameras of the same model, fixed on the optical platform, the lens is in the same plane, can move left and right to change the horizontal distance D of the two cameras, D can be directly read from the optical platform, As a parameter calculated below; D has no specified value, and the value of D is based on the principle that the target object can be imaged in the center of the image. Place the three-dimensional object to be reconstructed on the test bench, adjust D to an appropriate position and record its value, fix two cameras for image collection, and the images collected by the left and right cameras are respectively recorded as I1 and I2;
[0025] Step B1: Camera calibration and image correction, such as figure 1 In the camera calibration and correction part of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More