

Fusion method of different-accuracy three-dimension point cloud data based on mean shift
A technology of 3D point cloud and mean value shift, which is applied in image data processing, image data processing, image enhancement, etc. It can solve the problems that cannot truly reflect the drift difference of low-precision point cloud, the drift vector cannot truly reflect the drift error, and the precision is limited, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples are illustrative only, and are not construed as limiting the present invention.
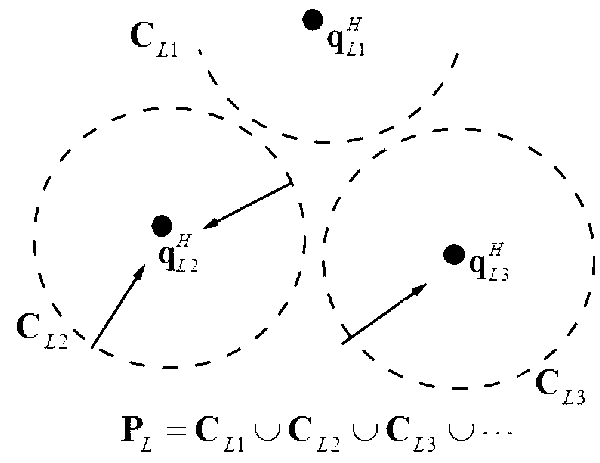
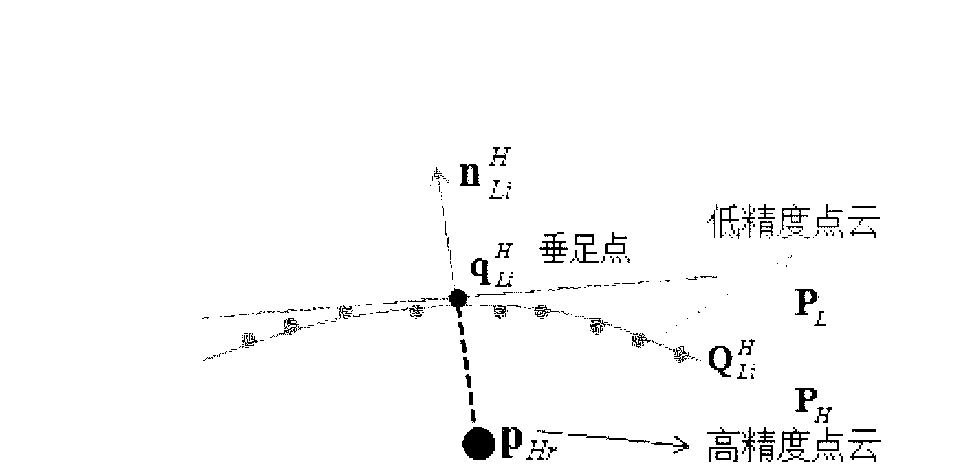
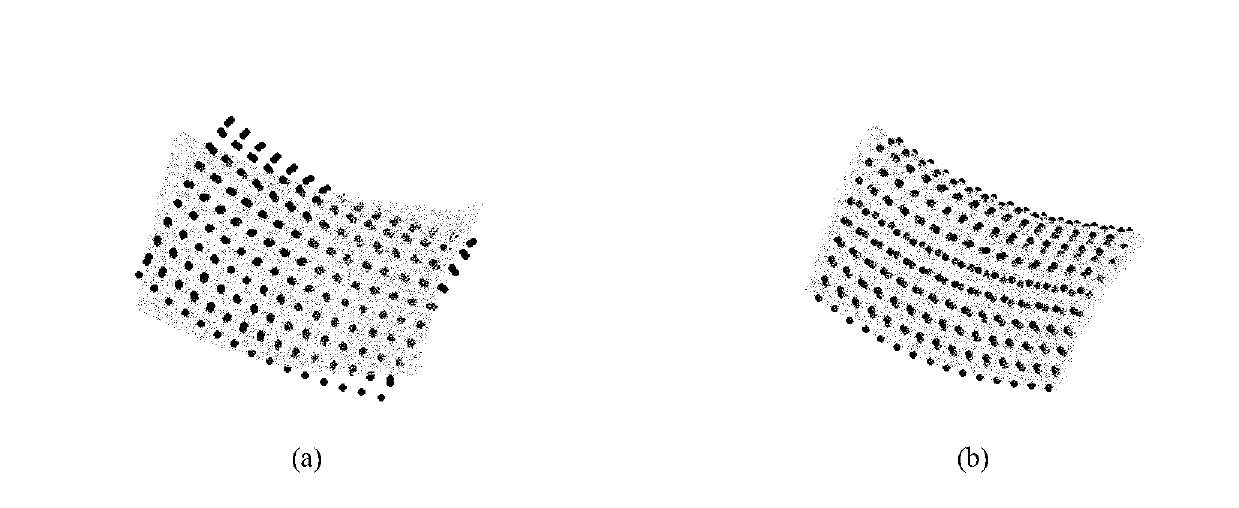
[0043] The method of this embodiment is aimed at two sets of three-dimensional point cloud data with different precision levels, using high-precision point clouds to analyze the drift error of low-precision point clouds, performing mean drift on low-precision point clouds, eliminating drift errors of low-precision point clouds, and Realize the smoothing of small-amplitude noise of low-precision point clouds, improve the accuracy level of low-precision point clouds, and realize the fusion of two sets of data information.
[0044] The point cloud in this embodiment is preferably described by a three-dimensional point cloud of the curved surface of the aviation blade. Among them, the high-precision point cloud data is generally prefera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More