Model-free adaptive control system of axial mixing magnetic bearing and control method thereof
A model-free self-adaptive and axial hybrid technology, applied in the field of control, can solve problems such as the difficulty of establishing mathematical models, and achieve fast response, strong self-adaptability and robustness, and convenient and direct input and output data collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
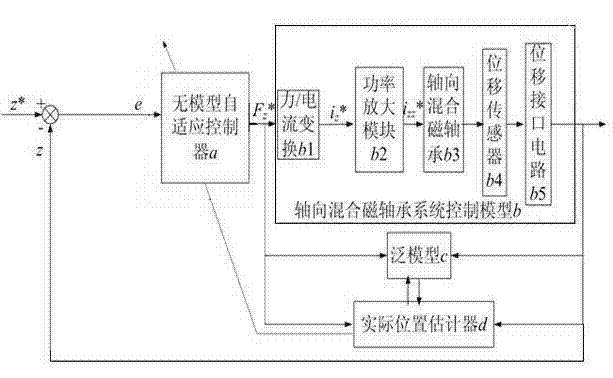
[0019] Such as figure 1 , the model-free adaptive control system for the axial hybrid magnetic bearing of the present invention is composed of a model-free adaptive controller a , Axial hybrid magnetic bearing system control model b , generic model c and the actual position estimator d A closed-loop control system composed of interconnections. Among them, the axial hybrid magnetic bearing system control model b Converted by Force / Current b 1. Power amplifier module b 2. Axial hybrid magnetic bearing b 3. Displacement sensor b 4 and displacement interface circuit b 5 are formed in series in sequence; the control model of the axial hybrid magnetic bearing system b As an overall control model, that is, as a compound controlled object of the model-free adaptive control system of the present invention. Control Model of Axial Hybrid Magnetic Bearing System b Both the input and output of are used as generic modelsc and the actual position estimator d input, while the gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



