

KINECT depth map cavity filling method based on local restriction reconstruction
A technology of local constraints and filling methods, which is applied in directions such as filling planes with attributes, and can solve problems such as edge expansion of depth maps, suboptimal calculated weights, and segmentation accuracy limitations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] The present invention utilizes the similarity in structure between the texture map and the depth map, constructs a cost function based on local constraint reconstruction to obtain the weight of non-hole pixels for hole filling, and more accurately fills the depth map in the edge area and smooth area hollow.
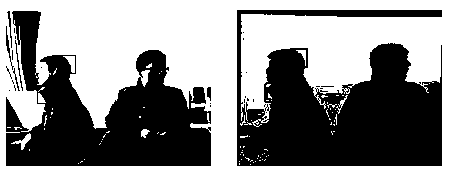
[0062] This specific embodiment utilizes KINECT to simultaneously collect the texture map and the depth map of the scene with a resolution of 480 × 640 pixels, see figure 2 , using the texture map to guide the hole filling of the depth map. Set search window S x The size is 21×21 pixels, the center block p(x) and the neighborhood block p(y n ) is 5×5 pixels in size, and the balance factor τ is set to 0.9.
[0063] Below will take figure as an example, describe the concrete steps of the inventive method in detail, as follows:
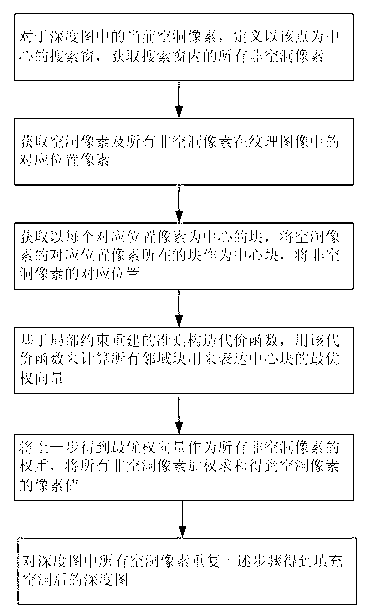
[0064] Step 1. Construct a search window S centered on the current hole pixel in the depth map x , and get all non-hole pixels within ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More