Check patentability & draft patents in minutes with Patsnap Eureka AI!
Gripper Segment and Gripper Mechanism
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A gripper and segment technology, which is applied in the direction of chucks, manipulators, program control manipulators, etc., can solve the problems of increasing gripper mechanism segments, reducing reliability, and high number of parts
Inactive Publication Date: 2015-09-09
ABB (SCHWEIZ) AG
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] A disadvantage within the prior art is that the number of components required for such a parallelogram structure is very high due to the bearings
This would on the one hand increase the work of constructing and manufacturing such a jaw mechanism segment and on the other hand would reduce the reliability of such a segment since individual components are potential sources of failure
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
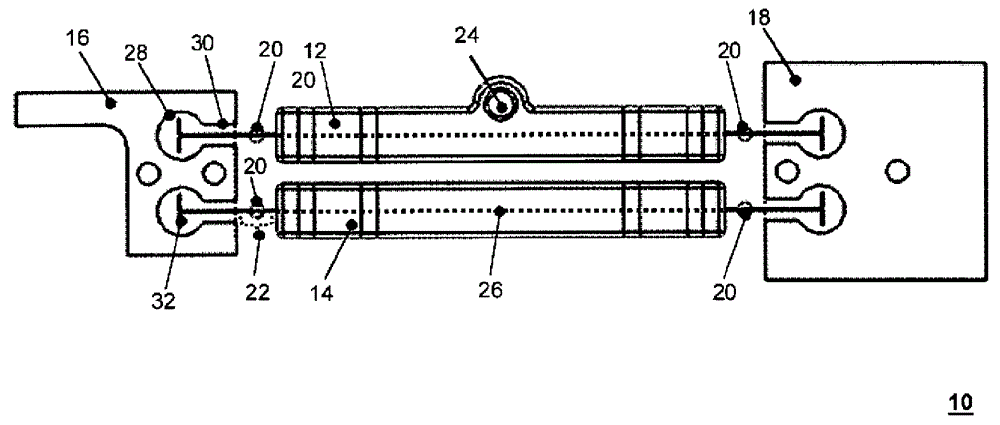
[0037] figure 1 A top view of a first exemplary jaw mechanism segment 10 is shown. The two parallel-arranged rod-shaped couplings 12 , 14 , the first coupling holder 16 and the second coupling holder 18 are arranged in a parallelogram configuration, in particular in the special case of a rectangular configuration. For the compliant connection between those four elements, four hinges implemented as plates of elastic material are foreseen, one of which is marked with the reference numeral 22 in this figure. Four pivot axes - one around each plate of elastic material 22 - are marked with the reference numeral 20 . The term "pivot axis 20" is not quite correct since each elastic material plate 22 has a longitudinal extension and the pivoting is achieved by deformation of the corresponding part of the elastic material plate along the longitudinal extension. In any event, for reasons of easier description of the invention, the deformation of the plate of elastic material should be...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
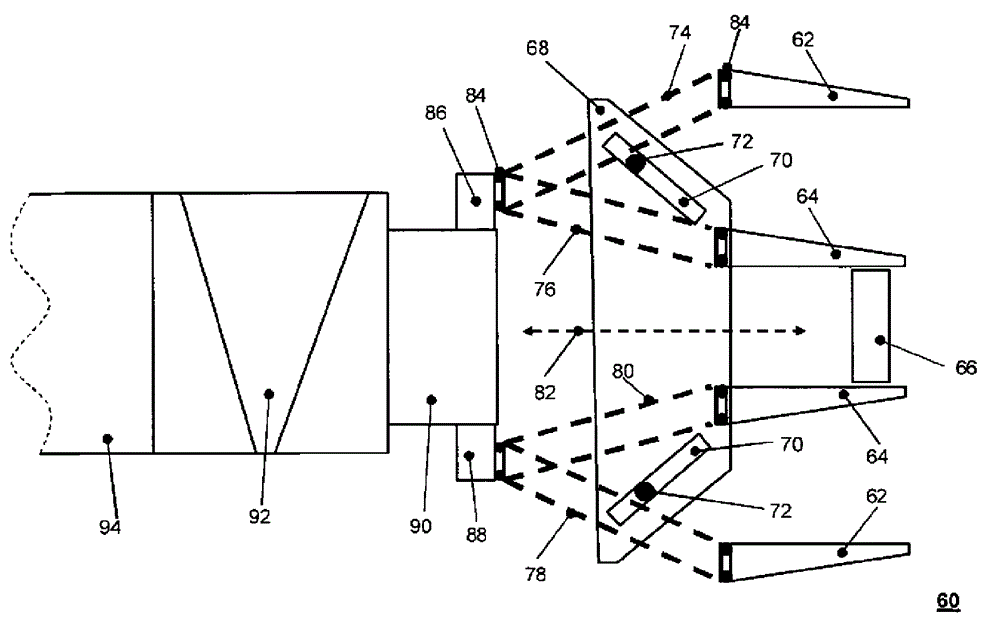
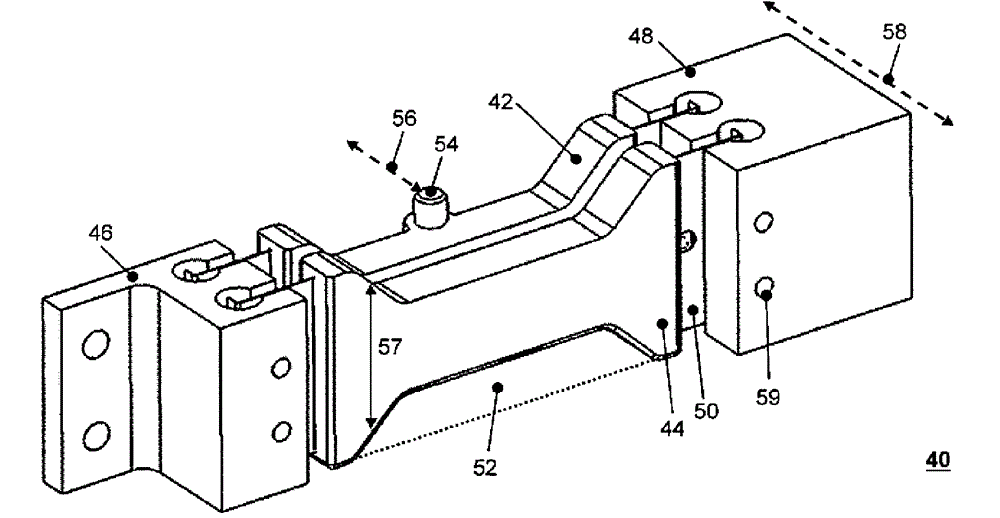
The invention is related to a gripper mechanism segment (10, 40, 74, 76, 78, 80), comprising two bar-like links (12, 14, 42, 44, 108, 110), a first (16, 46, 86, 88) and a second (18, 48) link holder which are connected together by four hinges to a pivotable parallelogram structure, whereas the four axis of pivoting (20, 84, 102) are in parallel. The hinges are carried out as elastic material plates (22, 104). The invention is also related to a gripper mechanism, comprising a base body (90), two gripper mechanism segments (10, 40) according to claim 7 or 8, which are connected thereto with their first link holders (16, 46, 86, 88) in that way, that the parallelogram structures are moveable in the same plane and obverse each to each other. The belonging second link holders (18, 48) are connected with a finger bar (62, 64) each, so that an object (66) inbetween the two finger bars (62, 64) can be gripped by pivoting the parallelogram structures against each other.
Description
technical field [0001] The invention relates to a jaw mechanism segment comprising two rod-shaped links, a first link holder and a second link holder, which are jointly connected by four hinges into a pivotable parallelogram structure, and The four pivot axes are parallel. The invention also relates to a jaw mechanism having two jaw mechanism segments. Background technique [0002] It is known that robots or other manipulators must be equipped with gripper mechanisms or gripper tools for some manipulation or manufacturing tasks, which include gripper fingers similar to the fingers of a human hand. The belonging clamping process itself may correspond to clamping the object to be clamped between at least two clamping jaw fingers, which are movable relative to each other. To enable such a clamping process, for example one movable and one fixed gripper finger, two movable and one fixed gripper fingers, or three movable gripper fingers Gripper mechanisms for moving jaw fingers...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More