Control method and control system of vehicle yaw stability and system thereof
A yaw stabilization and control method technology, which is applied to vehicle components, automatic steering control components, steering mechanisms, etc., can solve problems such as different wheel steering characteristics, vehicle deceleration, and slow response rate, so as to improve safety and accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
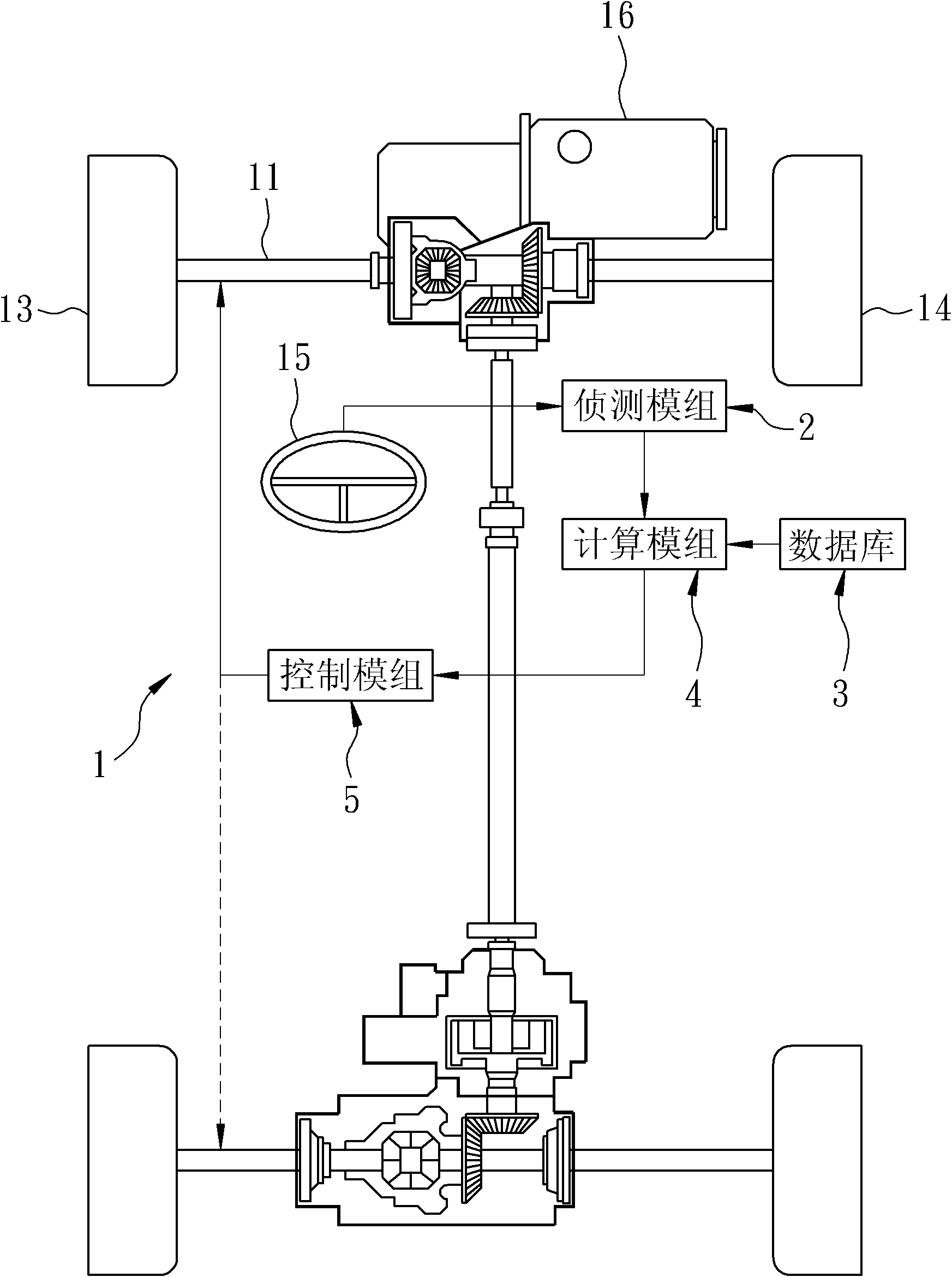
[0025] refer to figure 1 , a preferred embodiment of the vehicle yaw stability control system of the present invention is installed on a vehicle 1 in conjunction with a steering system (not shown). The steering system can be any one of active front wheel steering system (Active Front wheel Steer: AFS), wire steering system (Steer-by-wire: SBW) or four-wheel steering system (Four wheel Steering: 4WS) . The vehicle of this embodiment is equipped with an active steering system. The vehicle 1 has at least one wheel shaft 11 that outputs power, and rotates coaxially with the wheel shaft 11 and has at least a pair of wheels 13, 14 that determine the direction of action, and control the wheel shaft. A steering wheel 15 with 11 steering angles, and an engine 16 that outputs kinetic energy to the axle 11. The vehicle yaw stability control system includes a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com