

Calibrating method for two-dimensional laser and camera without overlapped viewing fields
A two-dimensional laser and calibration method technology, applied in image data processing, instruments, calculations, etc., can solve problems such as low precision, limited placement of cameras and laser scanners, and high cost of manual selection, etc., to achieve high Calibration accuracy, large field of view, and the effect of improving the degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the drawings.
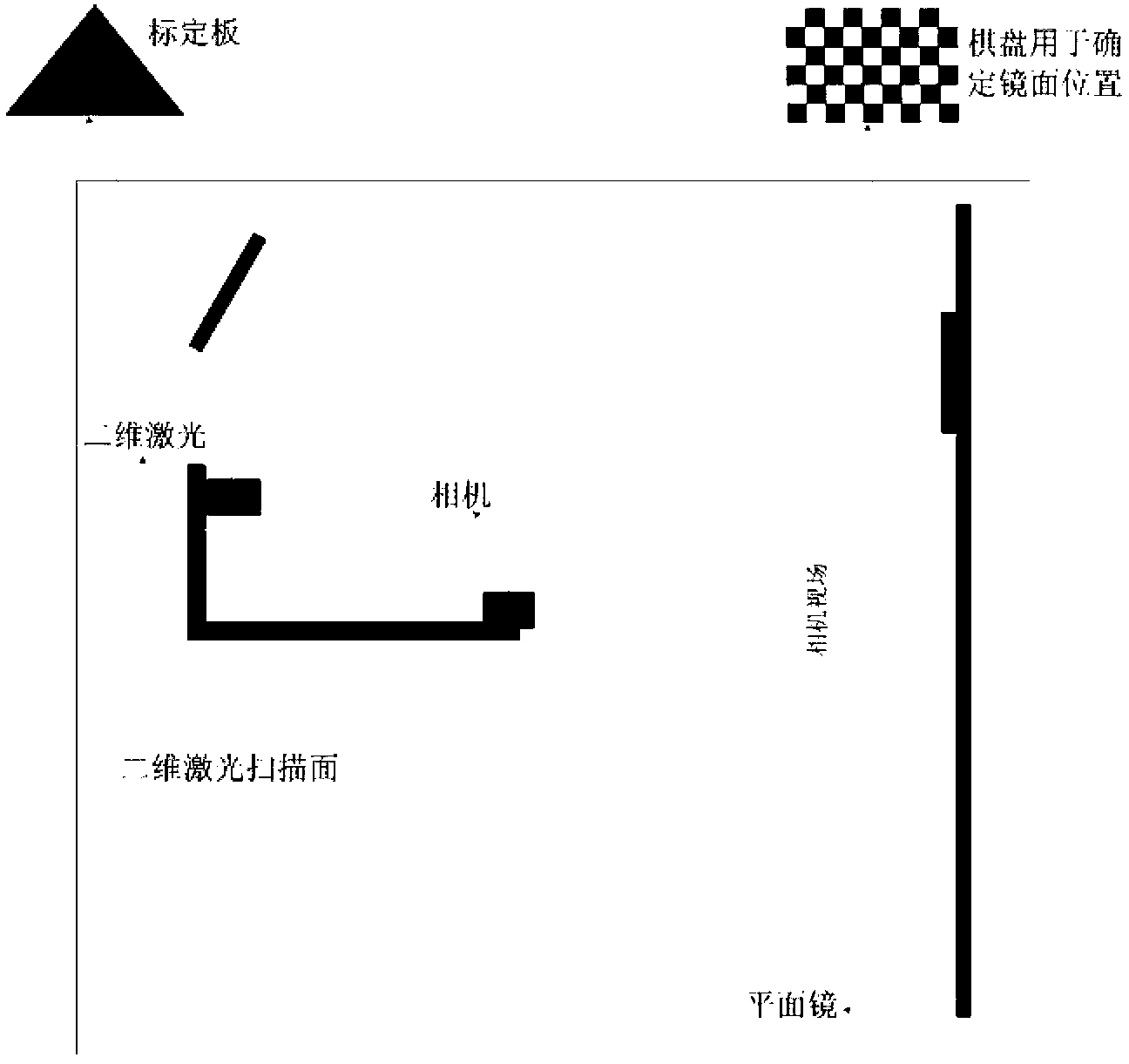
[0032] Such as figure 1 Shown is the composition diagram of the camera and two-dimensional laser calibration system of the present invention. The system mainly includes: two-dimensional laser scanner, camera, plane mirror, etc.
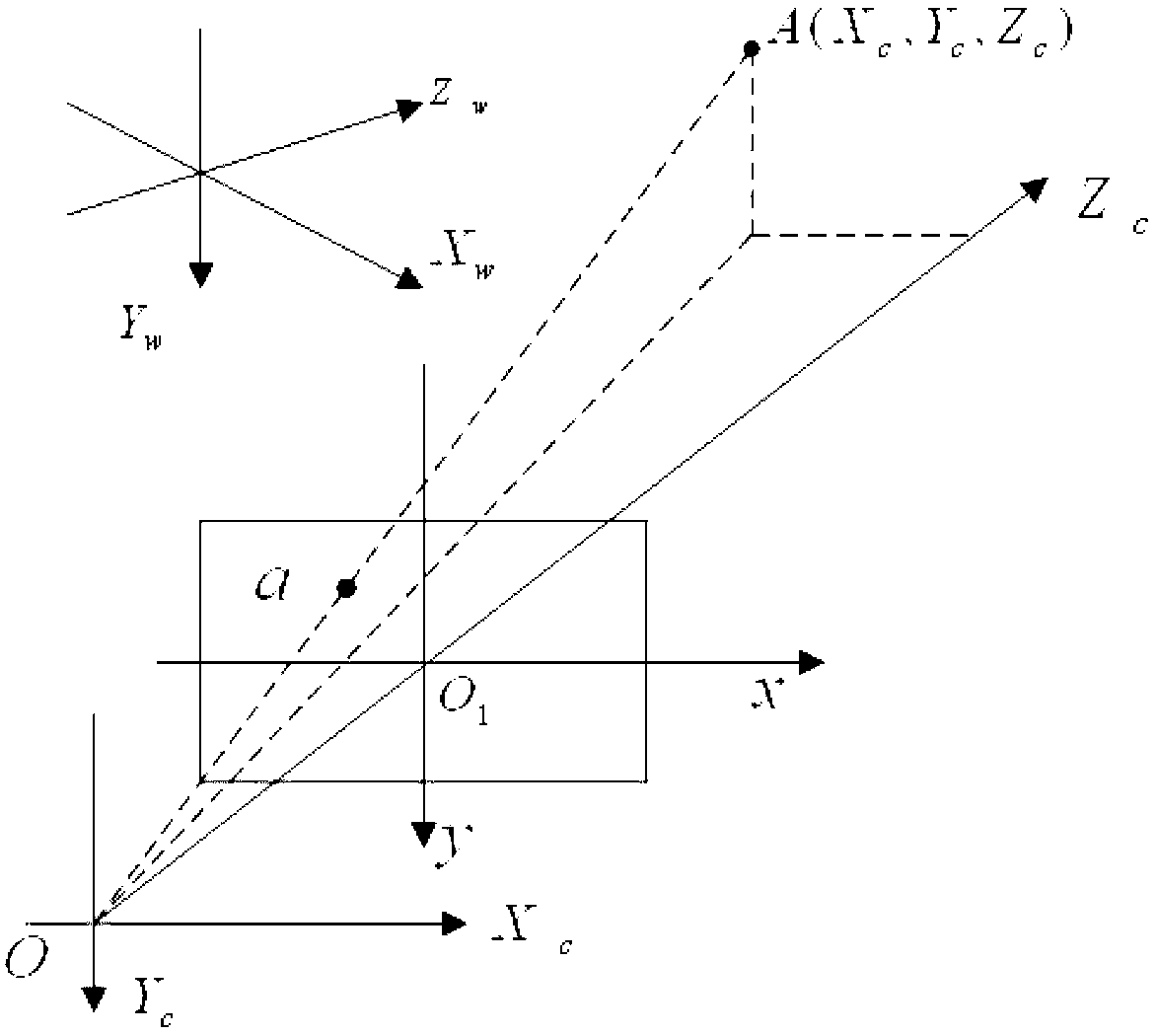
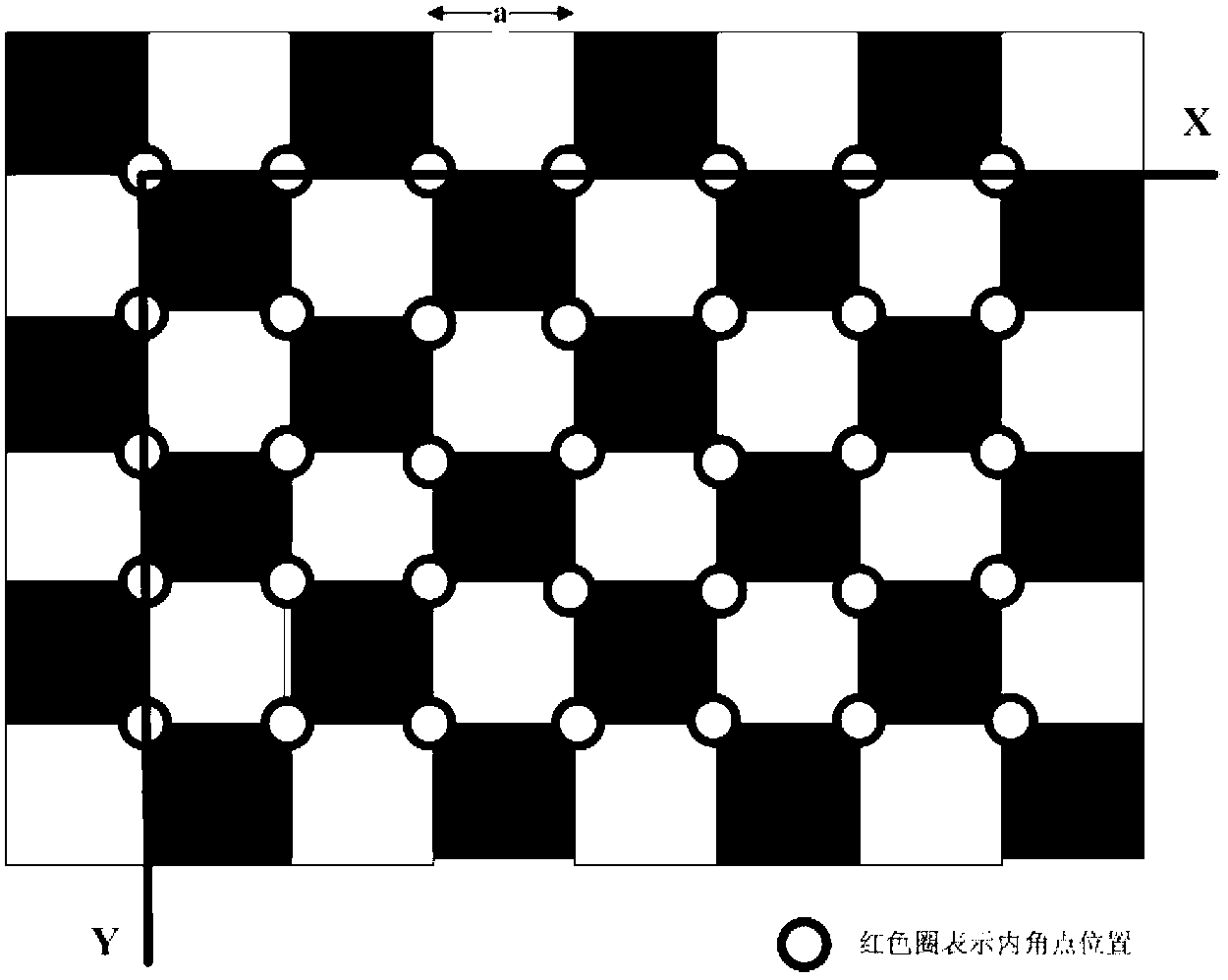
[0033] Step 1: Use the pinhole camera model to consider the lens distortion factor, and use the traditional checkerboard table to calibrate the camera's internal parameters. In the image plane, the upper left corner is the coordinate origin, the horizontal direction is the u axis, the vertical direction is the v axis, and the unit is pixel. Since the rectangular coordinate system uv only represents the number of rows and columns of pixels in the digital image, However, the position of the pixel in the image is not expressed in physical units, and a coordinate system xy expressed in physical units needs to be established. (x, y) represents the coordinates of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More