

Helicopter rotor blade dynamic trajectory measuring method based on four-nocular stereo vision
A technology for helicopter rotor and binocular stereo vision, which is applied in measurement devices, photogrammetry/video surveying, mapping and navigation, etc., can solve the problems of small field of view, difficult to achieve, and inability to measure the dynamic trajectory of rotor blades, etc. Achieving the effect of large field of view, high precision and good safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
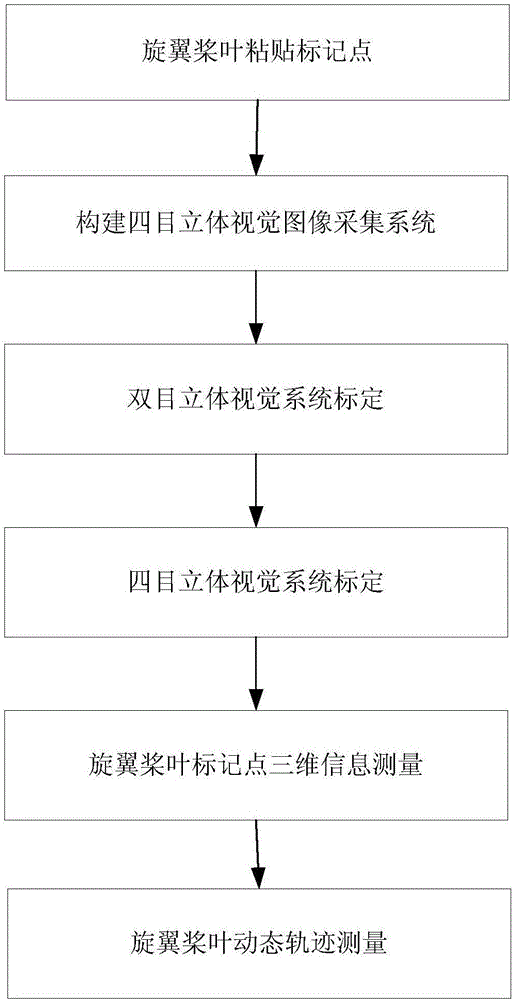
[0036] The present invention adopts such as figure 1 The flow chart of the method for measuring the dynamic trajectory of the helicopter rotor blade based on the four-eye stereo vision is shown to realize the measurement of the dynamic trajectory of the helicopter rotor blade. Specifically include the following implementation steps:
[0037] 1. Rotor blade paste mark point
[0038] The pasting position of the marking point of the present invention is as follows: figure 2 Shown: 5*2 double rows of ten marker points are used. It is required that the marked points have the same size and the same spacing, and the marked points are arranged on the quarter chord line and three-quarter chord line of the rotor blade respectively. Paste a reflective sheet on the root of the rotor blade for angle signal acquisition.
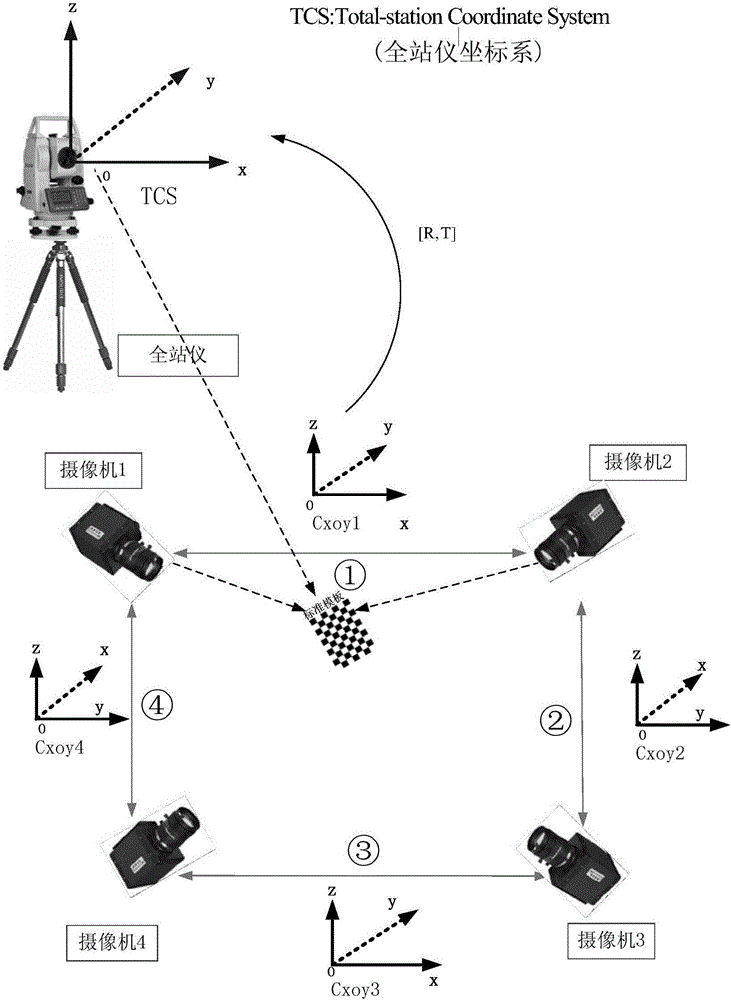
[0039] 2. Build a four-eye stereo vision image acquisition system
[0040] The present invention uses four-eye cameras, high-speed computers, angle sensors, and ligh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More