

Compensation method for error calibration of MEMS gyroscope in MIMU
A compensation method and error calibration technology, applied in the field of calibration compensation of inertial sensors, can solve problems such as inability to perform temperature calibration, decline in compensation effect, and secondary installation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
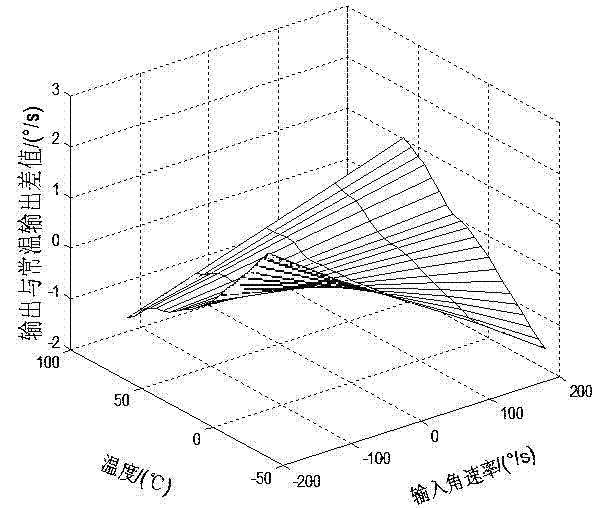
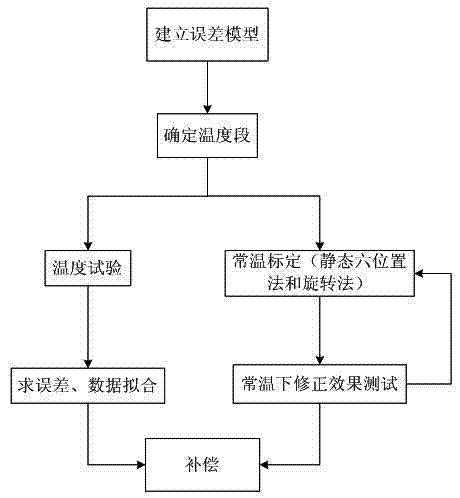
[0032] As shown in Figure 1, the main content of the present invention is to establish a brand-new system model according to the characteristics that the output deviation of the gyroscope and the output of the current gyroscope are in a primary relationship at the same temperature, and make full use of the MIMU structure package to determine that the three-axis gyroscope The installation relationship between them is fixed, and the non-orthogonal factor is stable and does not change with the ambient temperature. The non-orthogonal error and temperature drift error are calibrated separately. In the form of temperature segmentation, the normal temperature calibration of the three-axis gyroscope is completed using the static six-position method and the forward and reverse uniform rotation method on a two-axis 360°rotatable turntable without a temperatur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More