Satellite pointing tracking control method based on quasi-quaternion and quasi-quaternion kinematical equation
A kinematic equation and quaternion technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as lack of unity, unreasonable design of kinematic parameters, and inability to guarantee satellite motion paths, etc. To achieve the effect of easy acquisition, easy design analysis, and simple form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
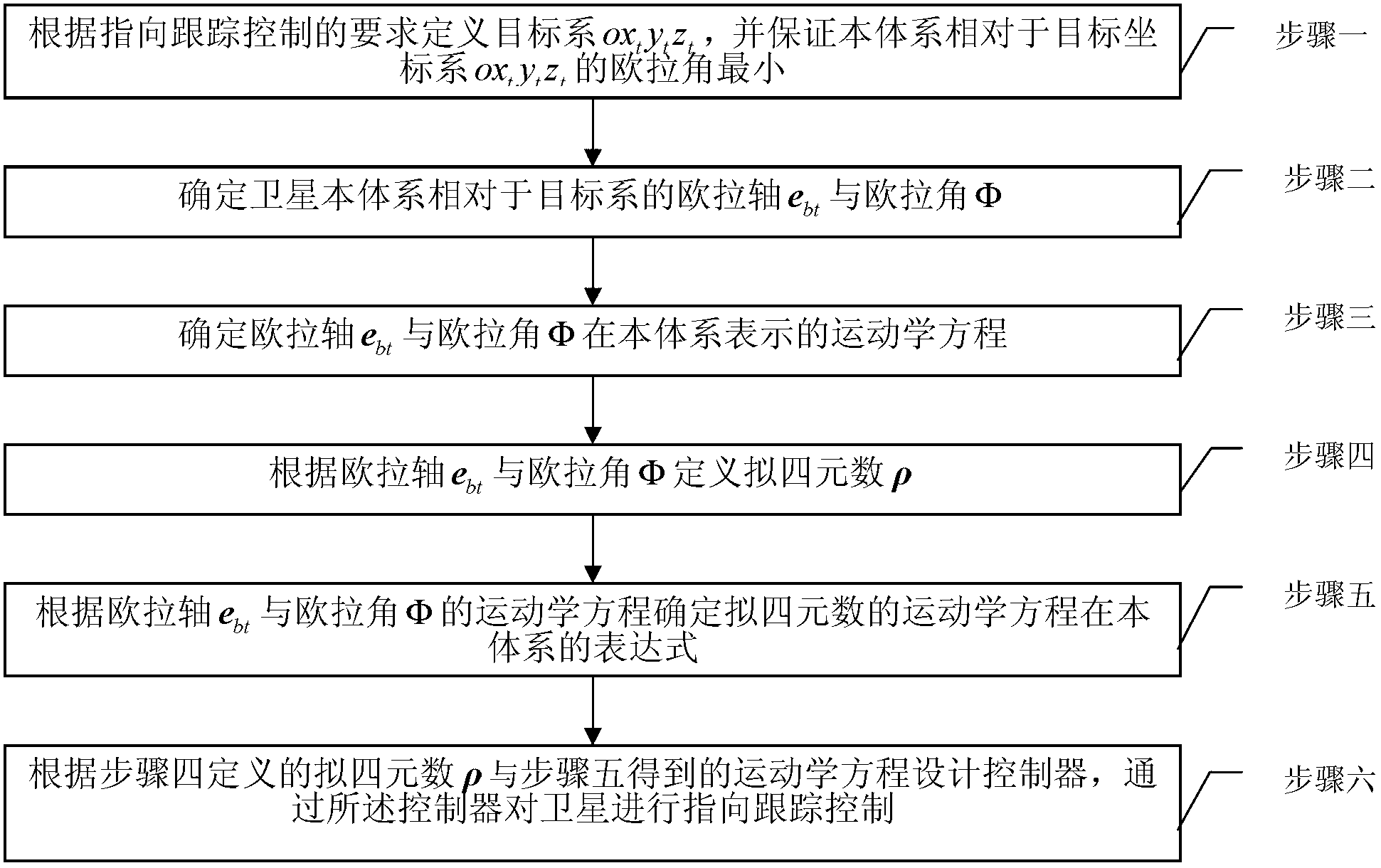
[0030] Specific implementation mode 1. Combination figure 1 This specific embodiment will be described. A satellite pointing and tracking control method based on pseudo-quaternion and pseudo-quaternion kinematics equation, it comprises the following steps:
[0031] Step 1. Define the target system ox according to the requirements of pointing tracking control t the y t z t , and ensure that the system relative to the target coordinate system ox t the y t z t The Euler angle is the smallest;
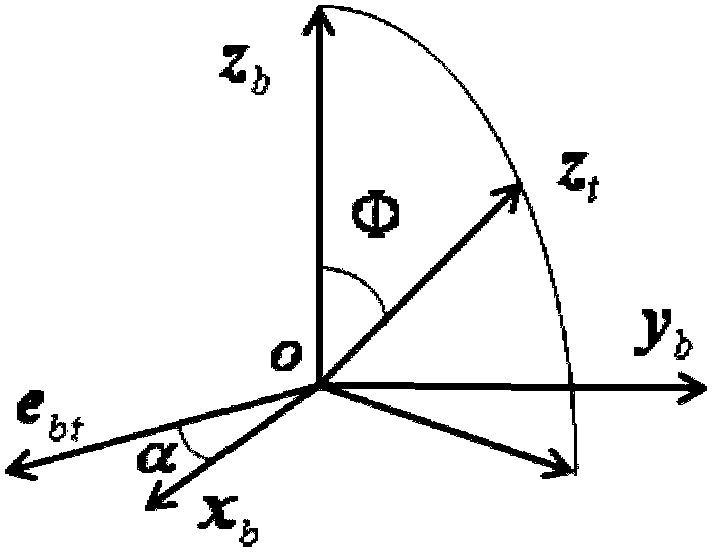
[0032] Step 2. Determine the Euler axis e of the satellite system relative to the target system bt and Euler angle Φ, the expression is:
[0033] e bt = z t × z b sin Φ
[0034] Φ=acos(z t ·z b )
[0035] In the formula, z t for the target system oz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More