Space multi-motion-body relative motion scaling semi-physical simulation system
A technology of relative motion and motion simulation, applied in the field of simulation, can solve problems such as lack of research results and methods, lack of complete description, etc., and achieve the effect of reducing funding and test space requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
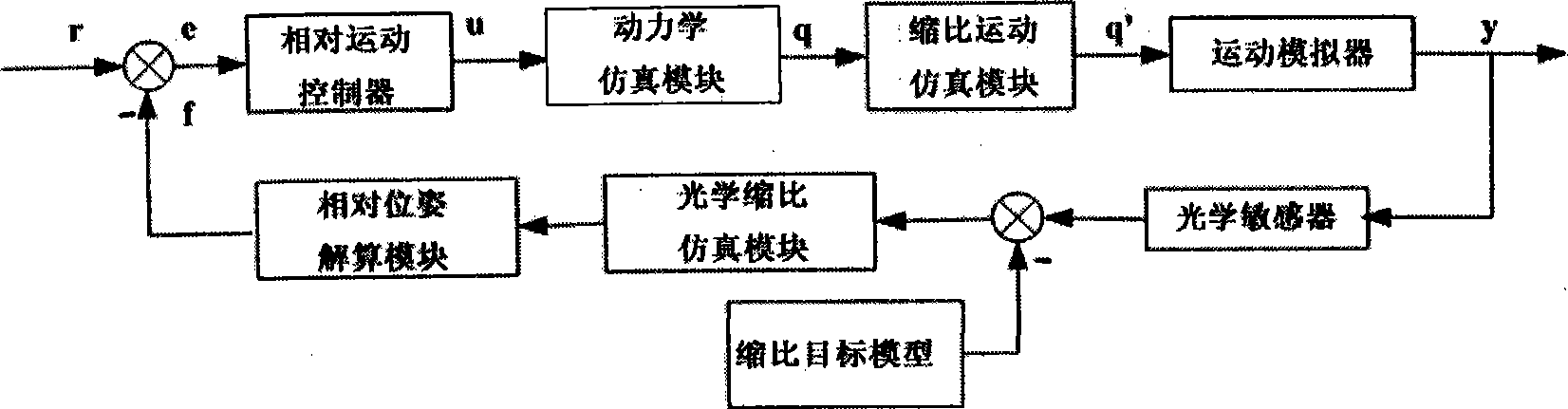
[0026] A semi-physical simulation system for the relative motion of multiple moving bodies in space, including a target motion simulator, the system also includes a relative motion controller, a dynamics simulation module, a motion simulator, a scaled motion simulation module, an optical sensor, an optical Scaled simulation module, relative pose calculation module and scaled target model, wherein the optical sensor is installed on the motion simulator, and the moving body simulated by the motion simulator is called the observed moving body;
[0027] The scaled target model is made in proportion according to the shape optical characteristics of the simulated moving body and the current scaled simulation coefficient k, and the scaled target model is installed on the target motion simulator;
[0028] The relative motion controller calculates the error e=r-f according to the relative position and attitude data f fed back by the optical sensor and the expected relative position and ...
Embodiment 2
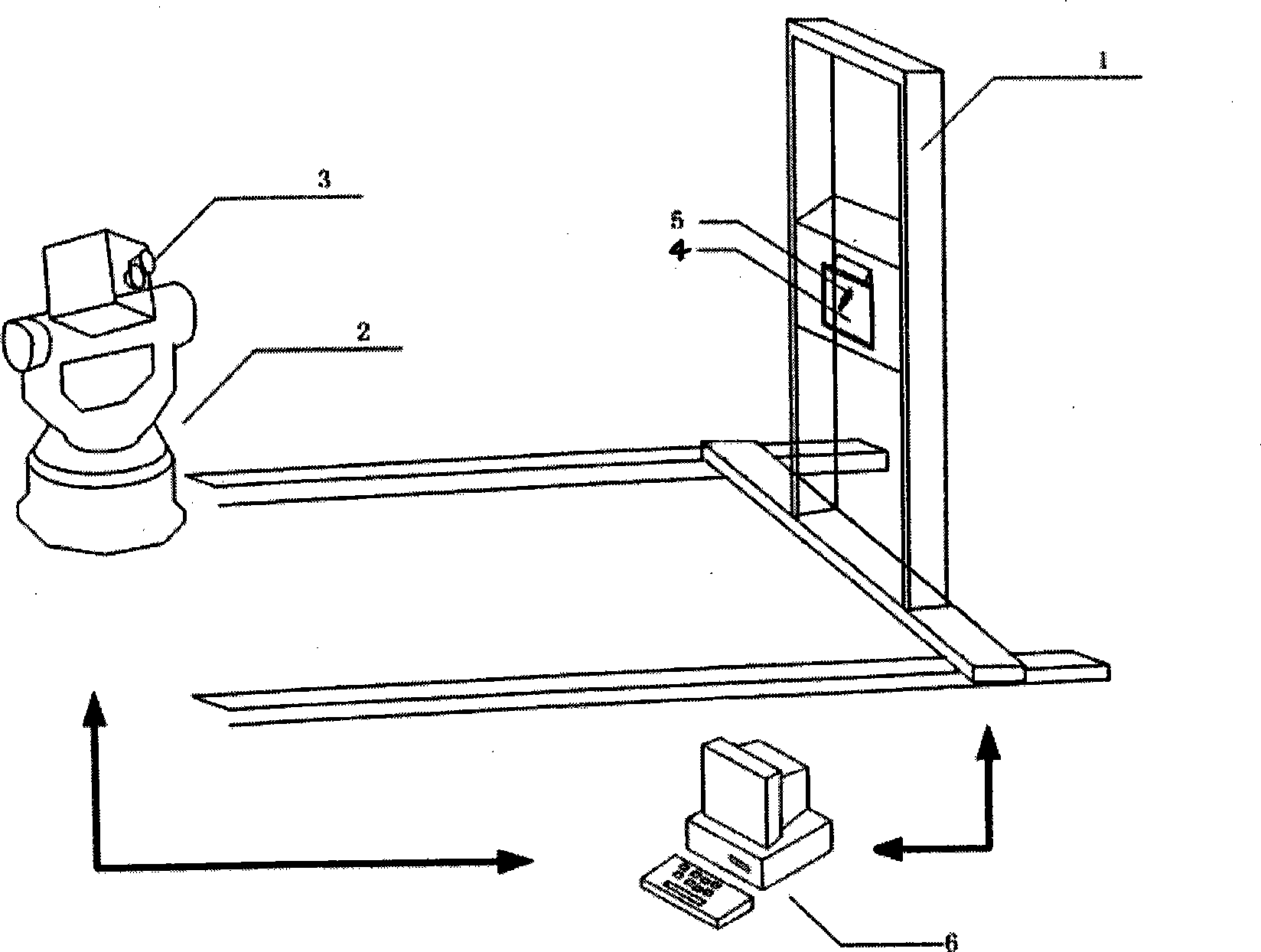
[0037] Space rendezvous near-distance semi-physical scale simulation system, including motion simulator 1 of active spacecraft (observing moving body), target motion simulator 2 corresponding to passive spacecraft (observing moving body), scaled target model 3, optical The sensor installation platform 4, the optical sensor 5 and the computer 6 are composed. Among them, the motion simulator of the active spacecraft consists of a high-precision three-dimensional translational motion simulator and a three-dimensional rotational motion simulator, which jointly realize high-precision three-dimensional position and attitude motion simulation. The target motion simulator 2 of the passive spacecraft uses a three-axis turntable to realize motion simulation, on which a scaled target model 3 designed according to the scaled simulation coefficient k is installed. The computer 6 can realize the motion control of the active and passive spacecraft motion simulators, the digital simulation of...
Embodiment 3
[0039] The scaling motion simulation system in the simulation system of Embodiment 2 meets the following requirements:
[0040] a) Corresponding to the same simulation distance, the stroke of the motion simulator is shortened to the original 1 / k;
[0041] b) The dynamics simulation and control links of the original simulation system remain unchanged.
[0042] In order to achieve the above requirements, the position of the target point relative to the camera coordinate system should be scaled by k times year-on-year, that is, k c p'= c p, the imaging remains unchanged at this time. Since the target is reduced by k times year-on-year, that is, kp'=p, there are:
[0043] c R r r Rp+ c R r r t+ c t r = c R r r R'p+k( c R r r t'+ c t r ) (1)
[0044] In the formula, p: coordinates of optical feature points in conventional simulation (k=1) passive spacecraft coordinate system;
[0045] p': coordinates of optical feature points in the passive spacecraft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More