

Quadruped-imitating stair-climbing robot
A robot and animal technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of heavy weight, large center of gravity fluctuation and low stability of crawler-type stair climbing devices, and achieve good environmental adaptability and stability, high movement Speed and acceleration, the effect of increasing labor productivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
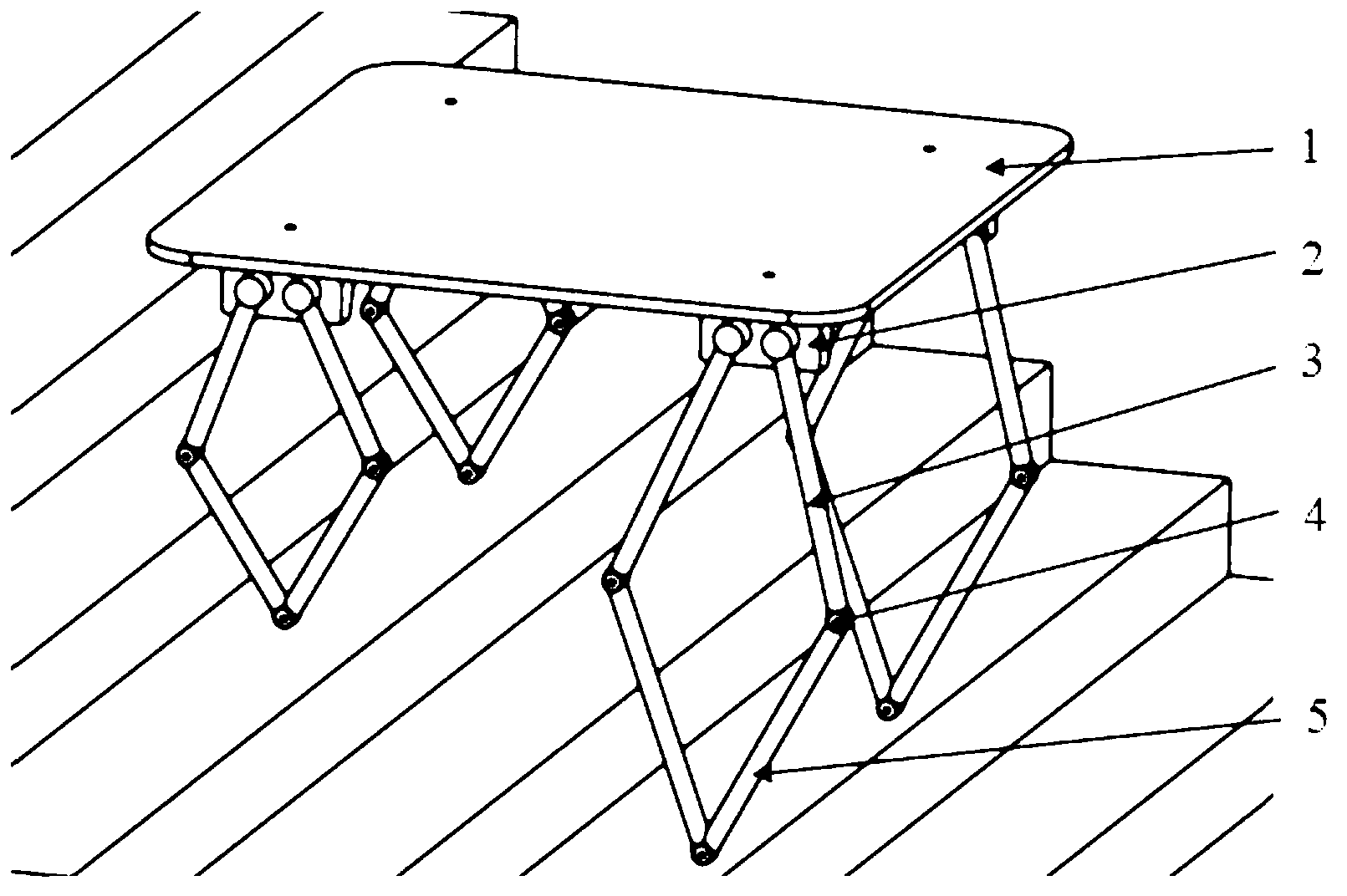
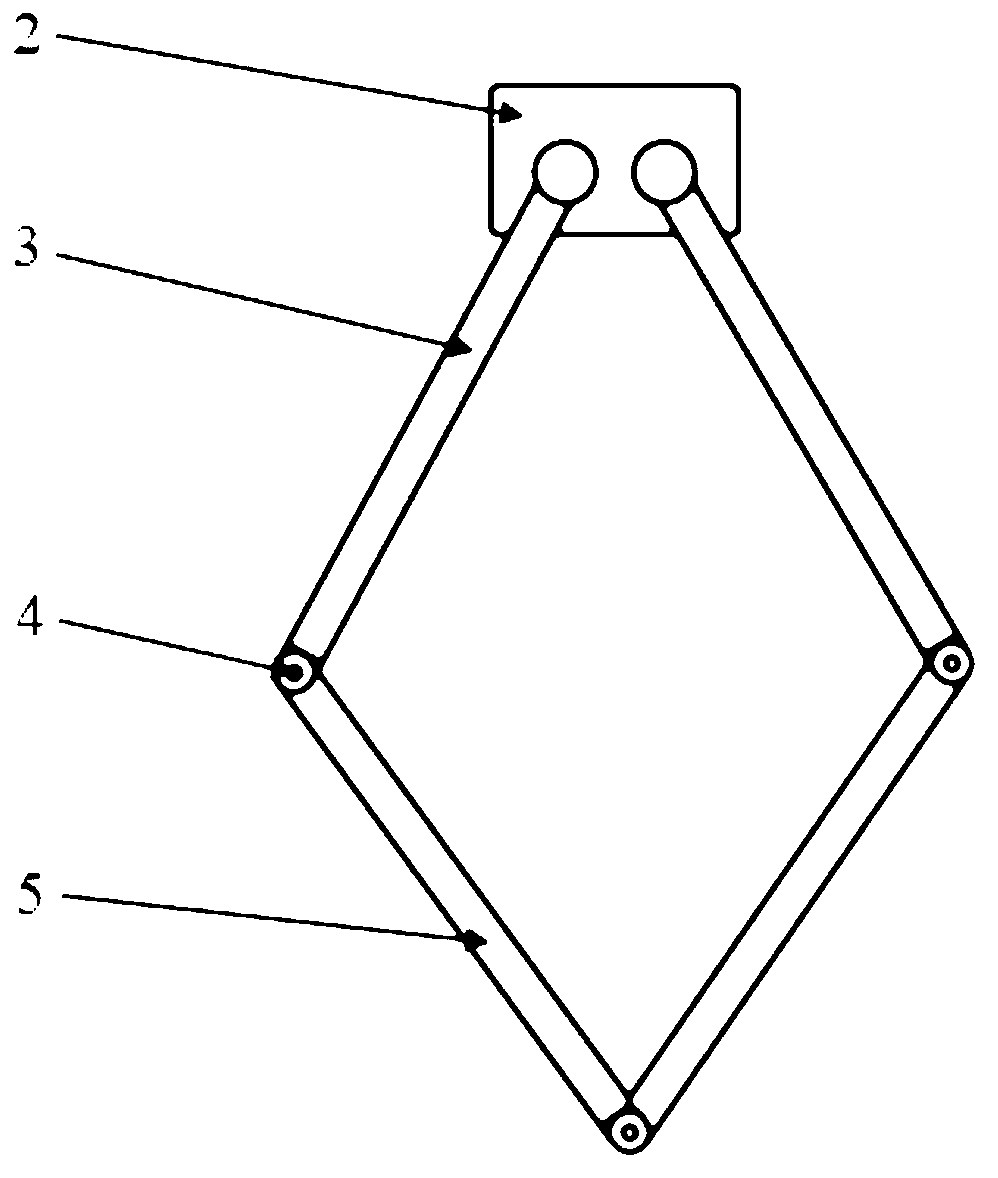
[0014] see Figure 1 ~ Figure 2 , a quadruped-like animal-climbing robot, comprising a loading board 1 and four parallel leg mechanisms connected thereto with the same structure, the two left and right parallel leg mechanisms are located at the front and lower side of the loading board, Two left and right parallel leg mechanisms are located at the rear and lower part of the loading board; each leg mechanism includes a frame 2 and two coplanar branch chains, and the frame 2 is connected to the loading plate. Plates 1 are connected by rotating hinges, and each branch chain includes a driving rod 3 and a driven rod 5, one end of the driving rod 3 is connected with the rotary drive device, and the other end of the driving rod 3 is connected with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More