

Thumb structure of prosthetic hand
A prosthetic hand and thumb technology, applied in prosthesis, medical science, etc., can solve the problems of heavy weight, insufficient flexibility, too many drives, etc., and achieve the effect of strong self-adaptive ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
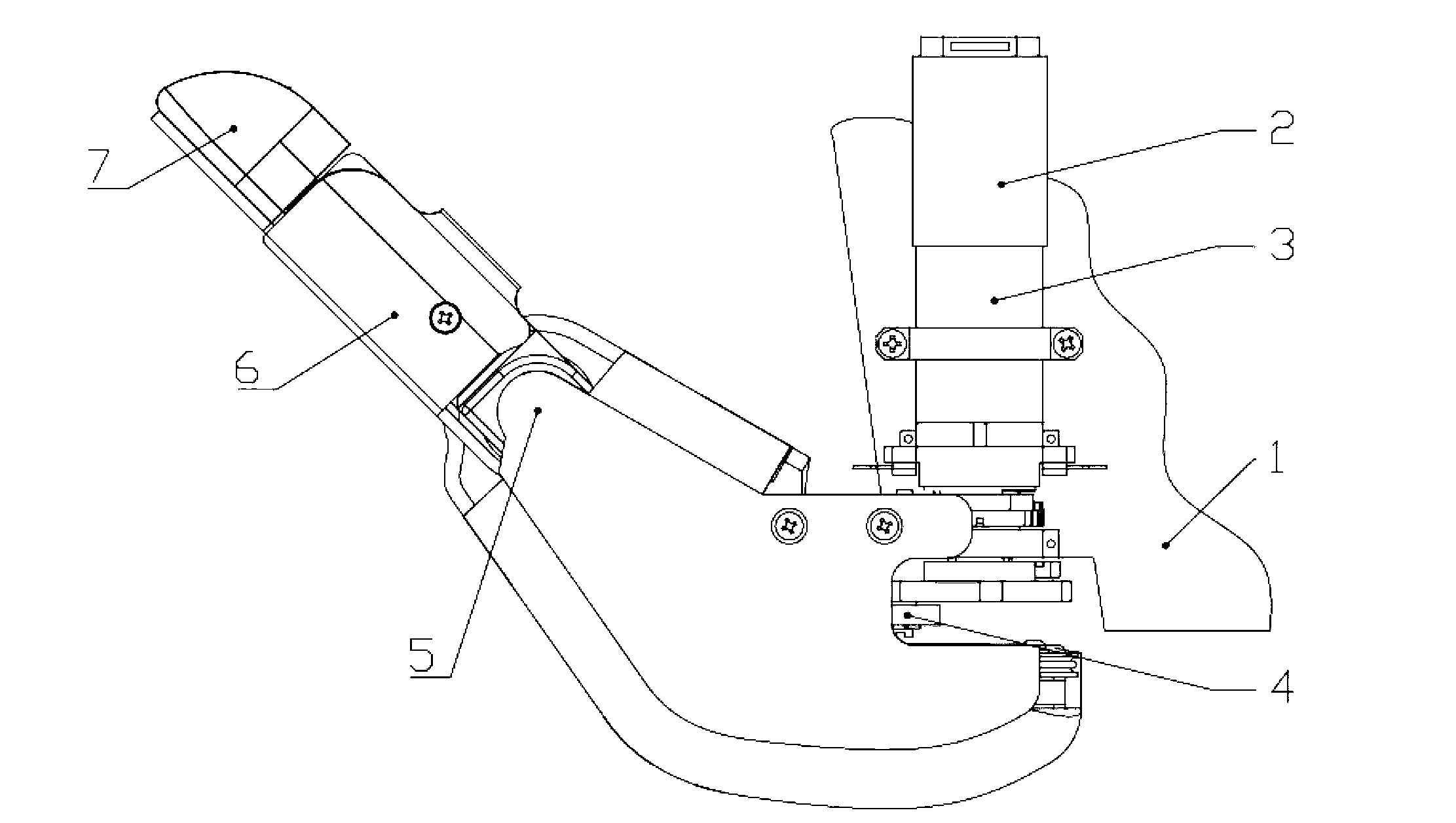
[0028] Such as figure 1 As shown, the present embodiment includes a palm base plate 1, a servo motor 2, a speed reducer 3, a transmission mechanism 4, a near knuckle 5, a middle knuckle 6 and a far knuckle 7; the servo motor 2 and the speed reducer 3 are fixed on the palm base plate 1, the servo motor 2 is connected to the reducer 3, the reducer 3 is connected to the transmission mechanism 4, the transmission mechanism 4 is connected to the proximal knuckle 5, and the proximal knuckle 5, middle knuckle 6 and distal knuckle 7 are connected in turn in rotation.
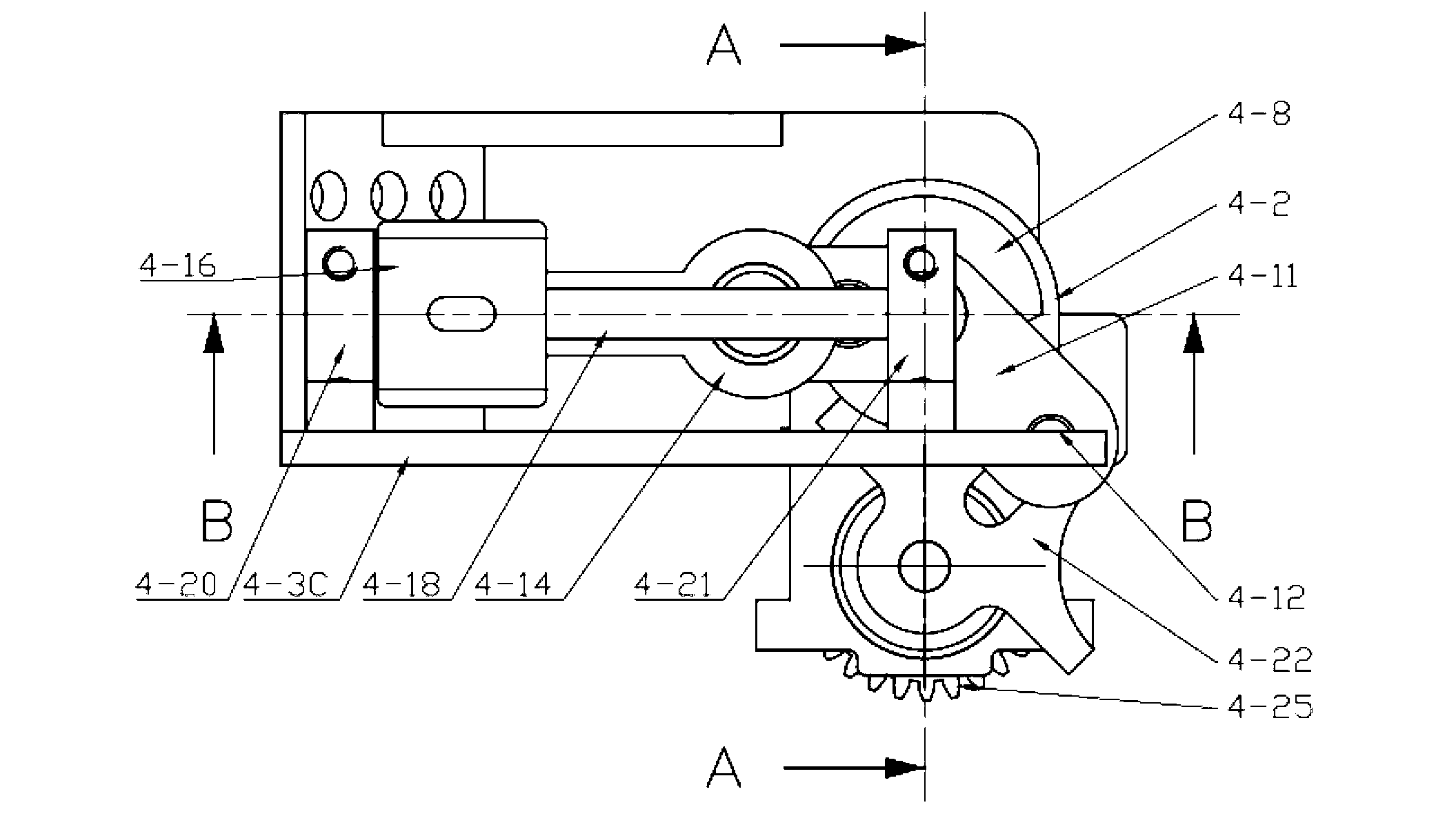
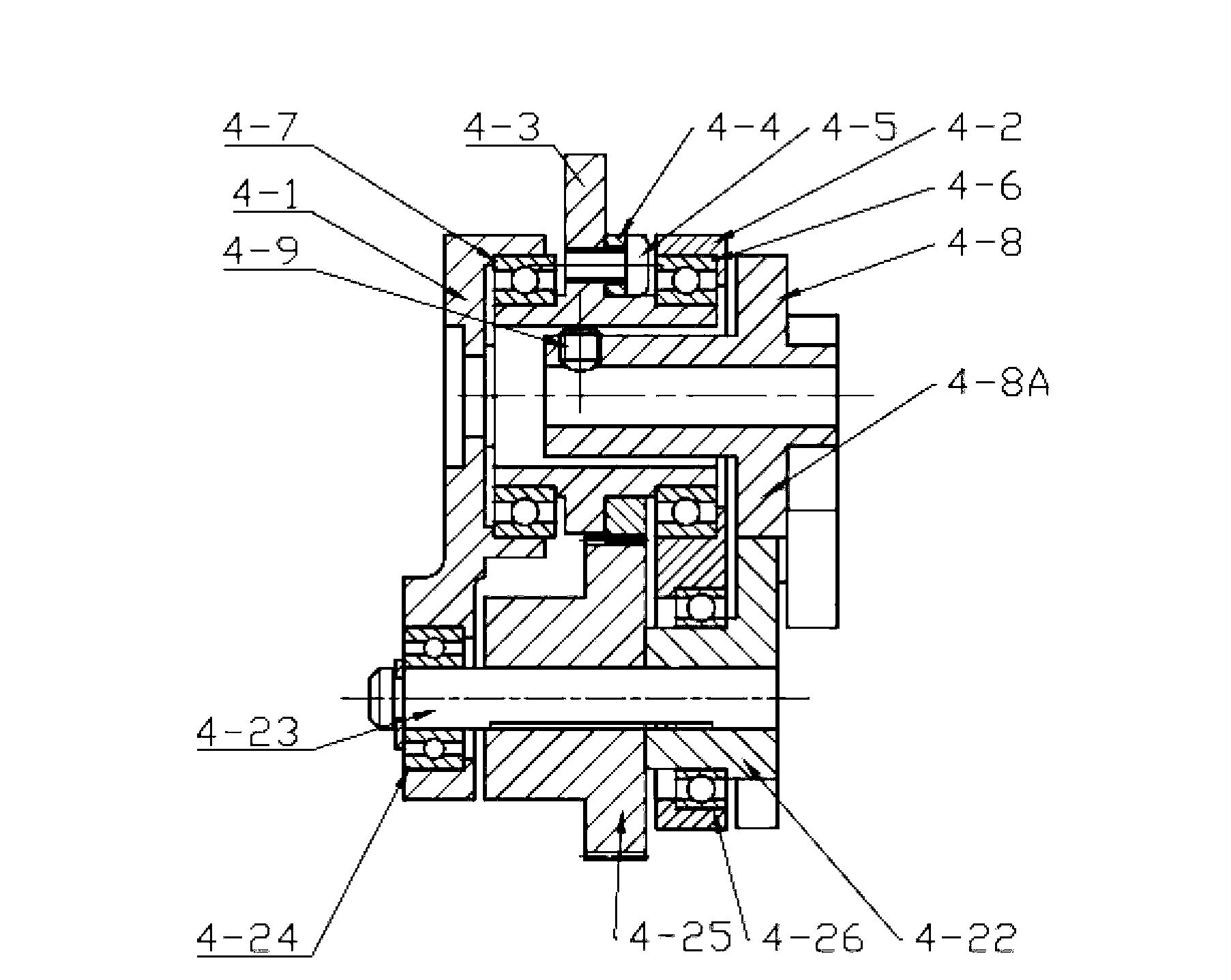
[0029] Such as figure 2 , image 3 , Figure 4 As shown, the transmission mechanism 4 includes a motor support plate 4-1, a sheave support plate 4-2, a thumb base 4-3, a driven gear 4-4, a round head screw 4-5, a first ball roller Sub-bearing 4-6, second ball roller bearing 4-7, driving dial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More