

retractable electric drive manipulator
A manipulator and electric drive technology, applied in the field of manipulators, can solve problems such as poor practicability, achieve good practicability, improve flexibility, and improve the ability to grasp
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
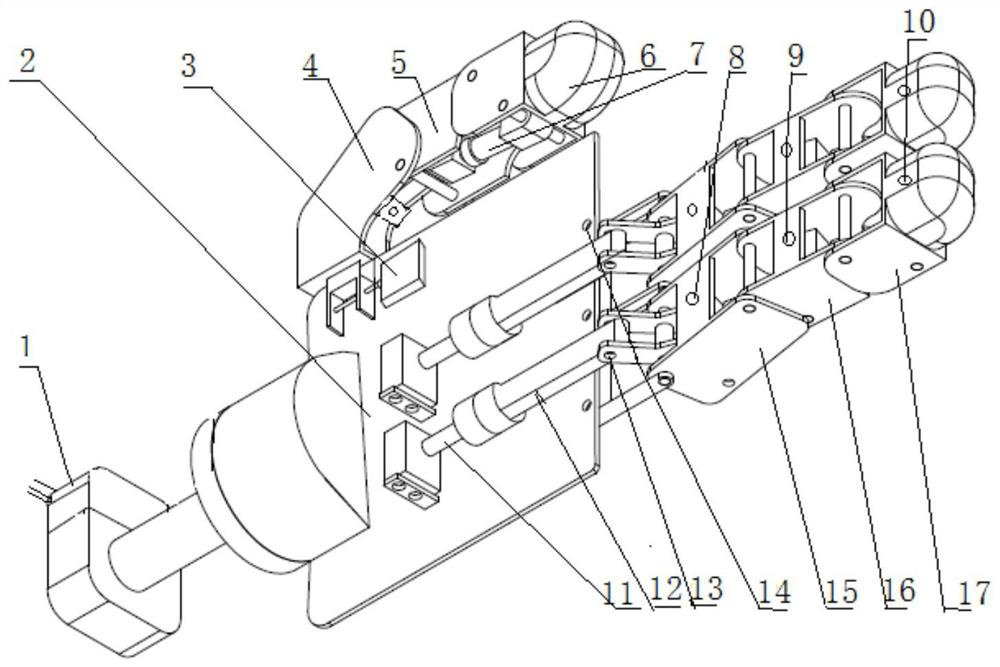
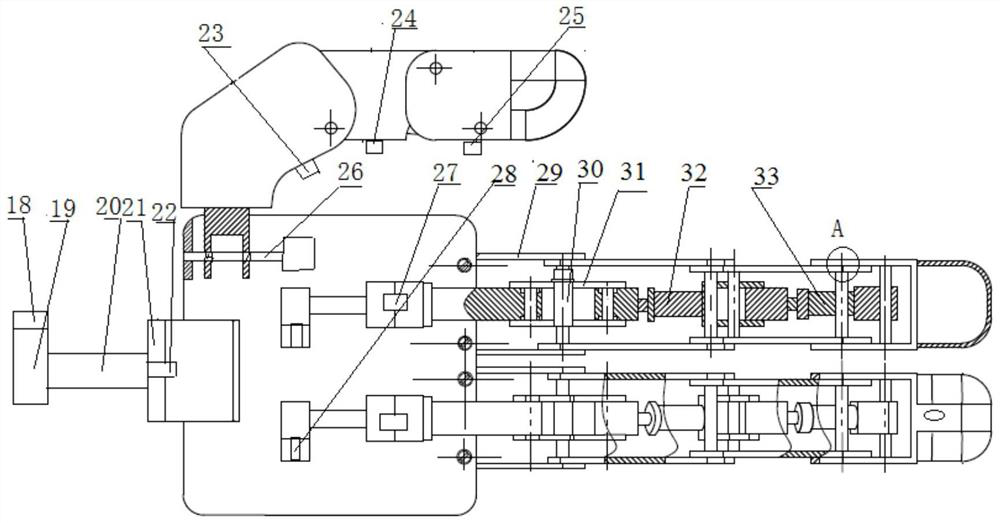
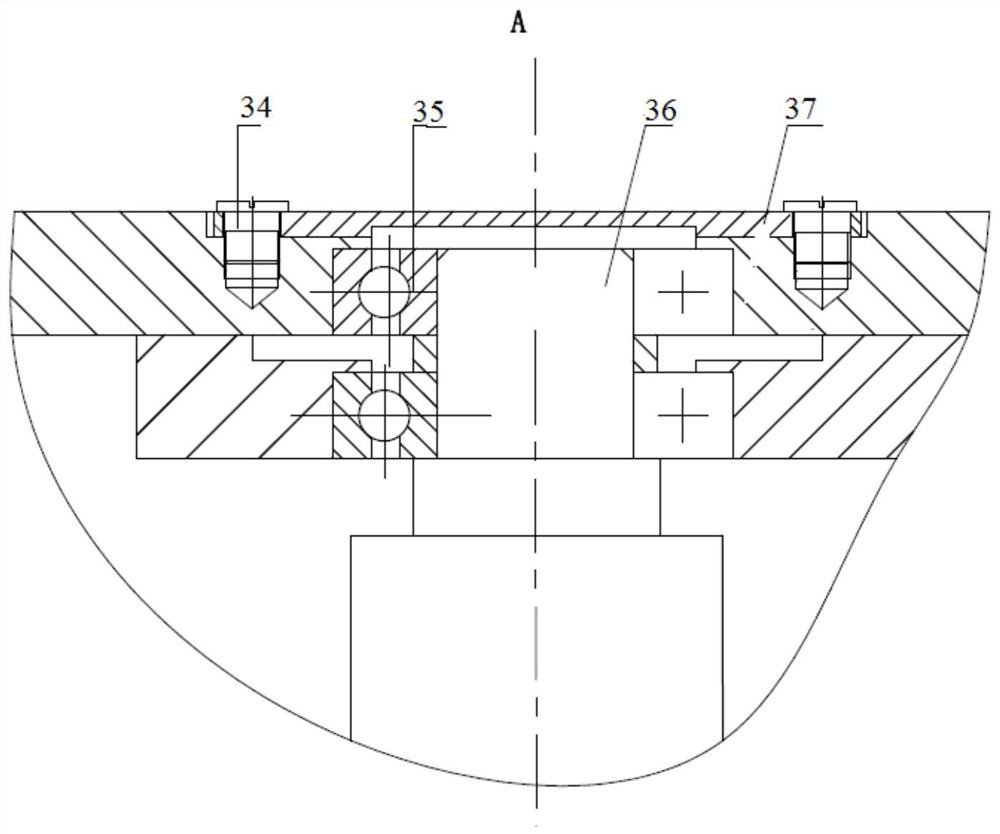
[0019] The following examples refer to Figures 1 to 10 .
[0020] The retractable electric drive manipulator of the present invention includes a palm electromechanical actuator 1, a palm 2, a thumb motor 3, a proximal phalanx of the thumb 4, a middle phalanx of the thumb 5, a distal phalanx of the thumb 6, a thumb electromechanical actuator 7, and a proximal phalangeal sensor 8. Middle knuckle sensor 9, distal knuckle sensor 10, proximal knuckle electromechanical actuator 11, proximal knuckle push rod 12, push rod bolt 13, palm bolt 14, finger proximal knuckle 15, finger middle knuckle 16, finger Distal knuckle 17, actuator motor 18, reducer 19, planetary roller screw 20, nut 21, load bolt 22, thumb proximal knuckle sensor 23, thumb middle knuckle sensor 24, thumb distal knuckle sensor 25, thumb Heel joint shaft 26, finger bolts 27, proximal phalanx electromechanical actuator bolts 28, proximal phalanx connector 29, first shaft 30, middle phalangeal rocker arm 31, middle pha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More