

Three-dimensional reconstruction method of scene spots in binocular stereo visual system
A technology of binocular stereo vision and 3D reconstruction, applied in stereo systems, televisions, electrical components, etc., can solve complex problems, such as the lack of optimal solutions, and achieve the effect of small calculation amount, elimination of calculation errors, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
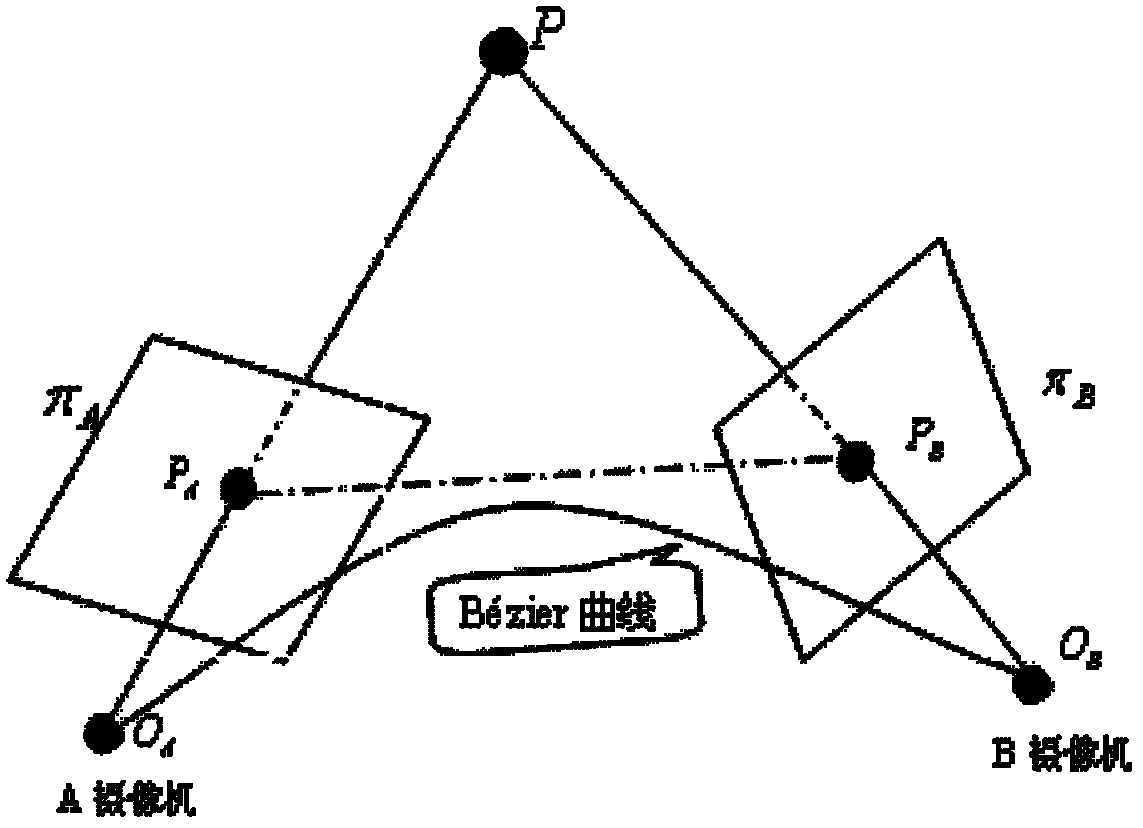
[0017] figure 1 Shown is a binocular camera stereo vision reconstruction system, which includes A and B cameras, O in the figure A and O B are the optical centers of cameras A and B respectively; π A , π B are the imaging planes of camera A and camera B respectively; P A , P B is a scene point respectively projected onto π A , π B The image point formed on , that is, the scene point on the imaging plane π A , π B The corresponding points formed; ideally, through the binocular camera optical center O A , O B and a scene at the imaging plane π A , π B Image points P are formed respectively A , P B Ray O A P A and O B P B should intersect at a point P, which is the original image point of the scene point in space. The present invention constructs a kind of direct method of the coordinate of three-dimensional reconstruction P, comprises the following steps:
[0018] 1. Calibrate the binocular cameras, namely A and B cameras, and calculate the optical center coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More